NX-CT 高速カウンタユニットアプリ紹介動画(充填量制御・ノンストップ画像検査)
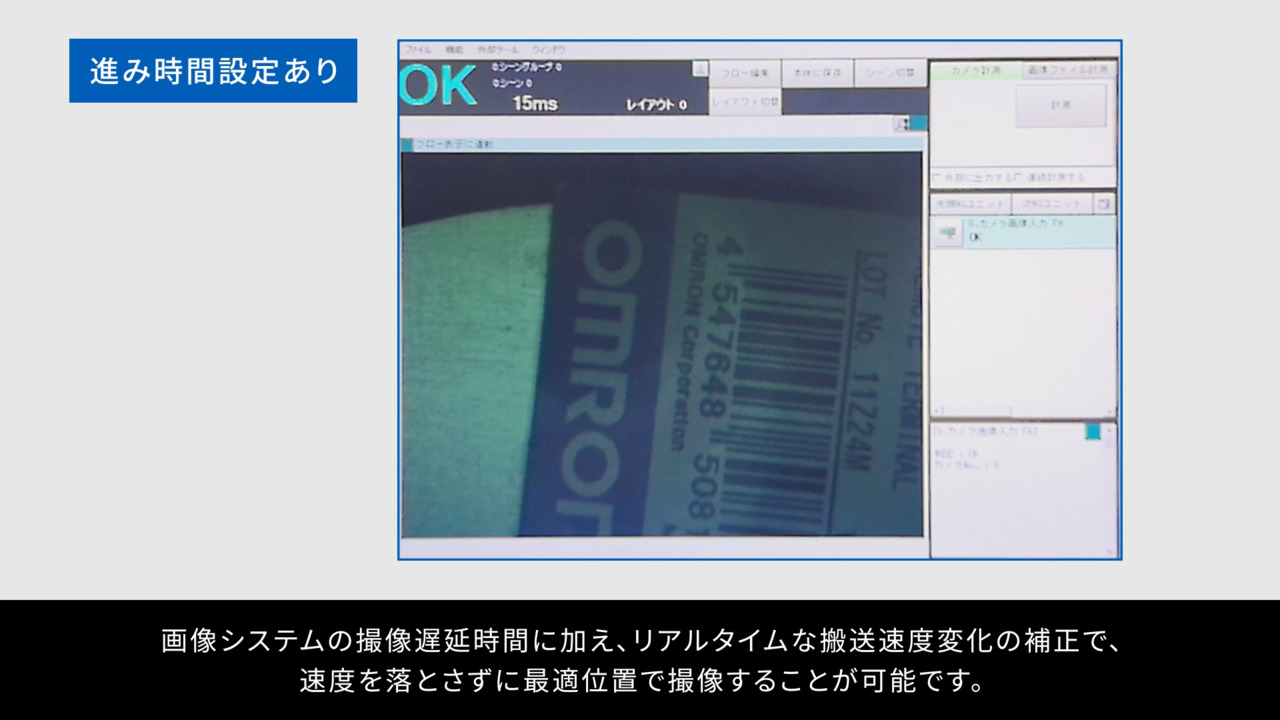
遅延・変動を補正し高速・高精度制御を実現するアプリをデモ機動作でご紹介します。
遅延・変動を補正し高速・高精度制御を実現するアプリをデモ機動作でご紹介します。
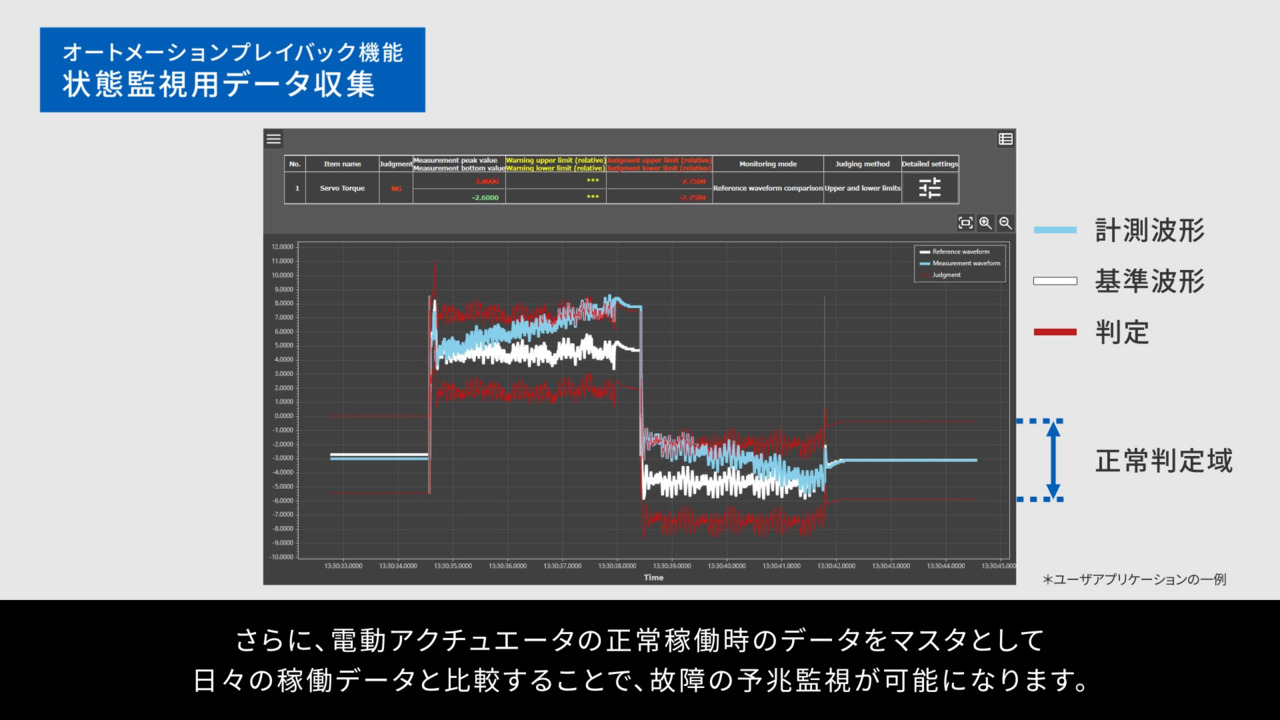
監視回路を制御回路に追加することなく、電動アクチュエータの稼働データ比較を行い、故障の予兆監視を実現する様子をご紹介します。
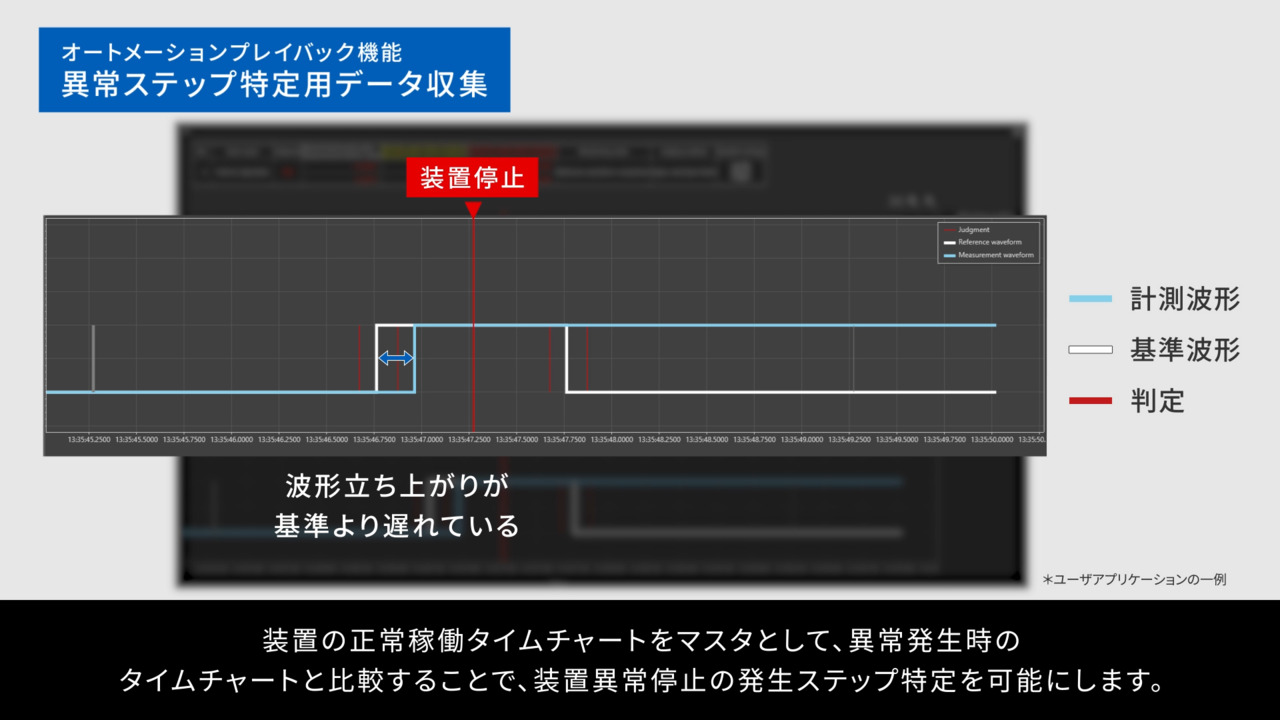
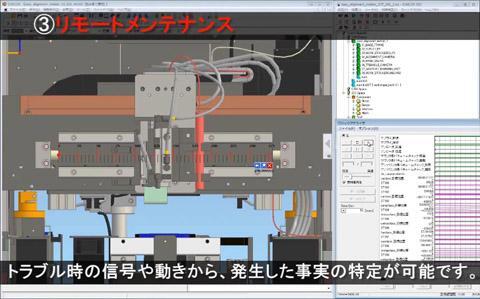
装置の異常ステップ特定用データを使用し、異常発生ステップを特定する様子をご紹介します。
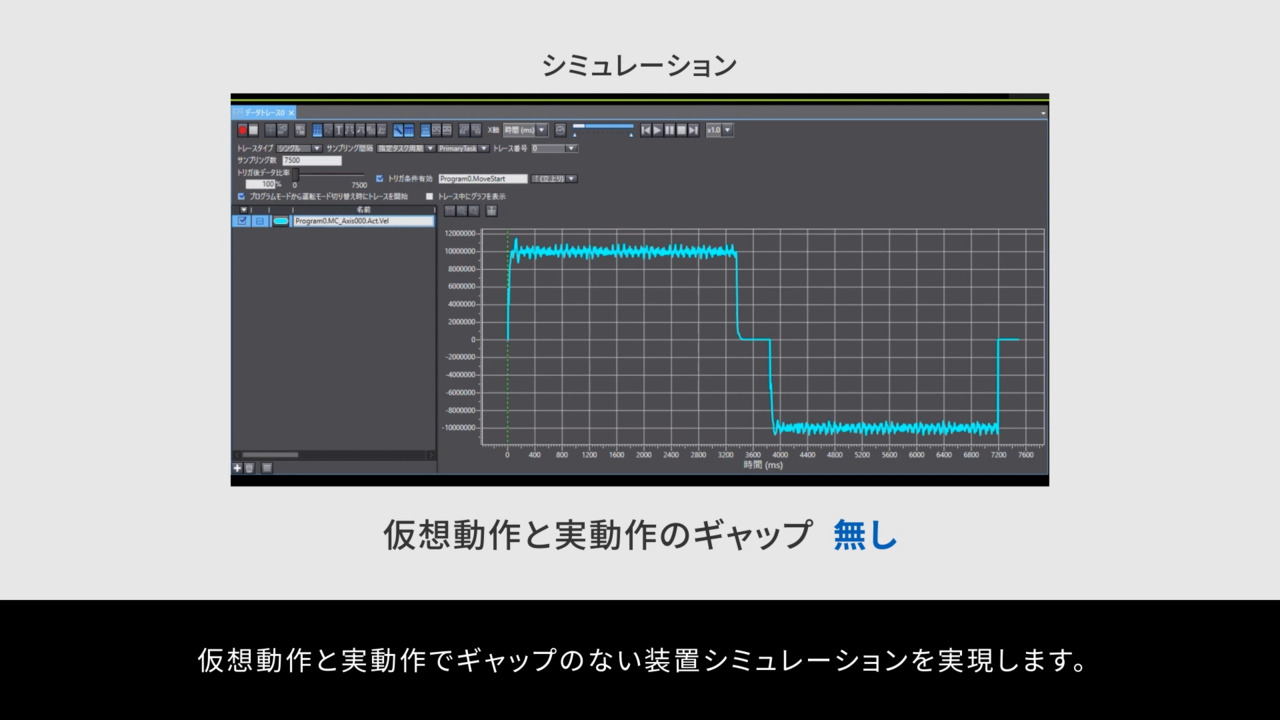
装置の動作データと仮想シミュレーション動作データでギャップのないシミュレーションが行える様子をご紹介します。
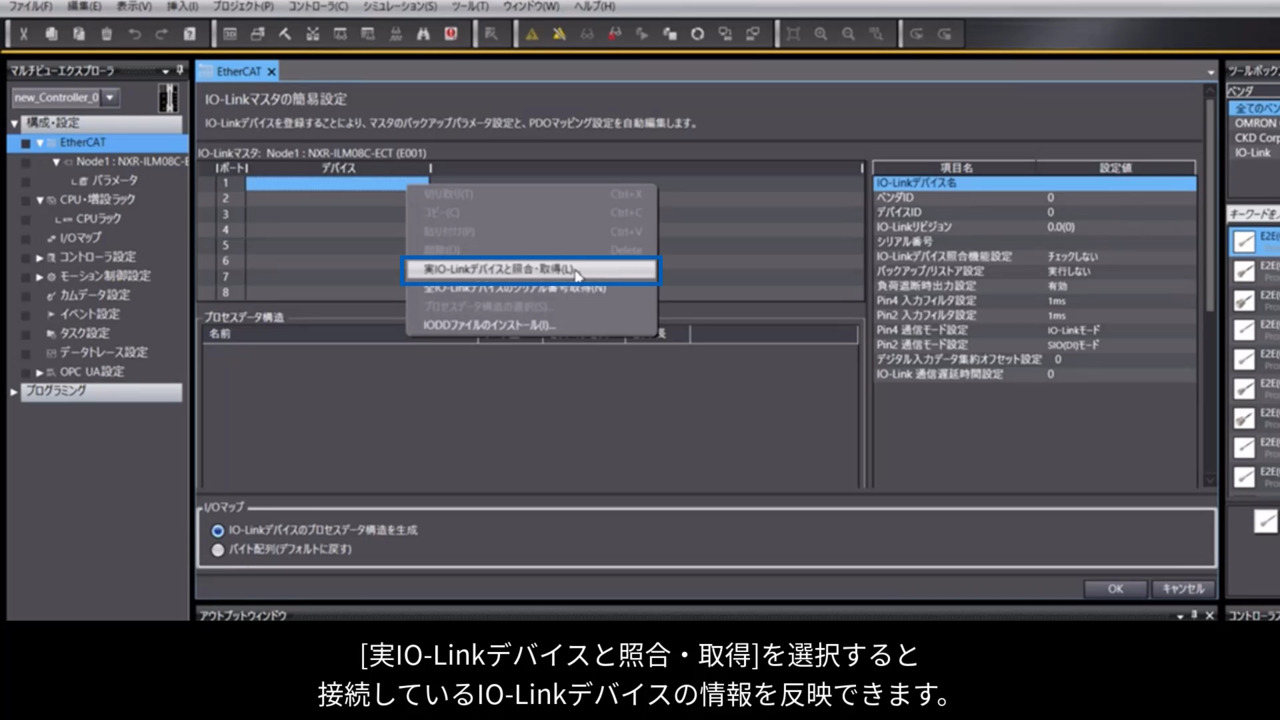
Sysmac Studio IO-Linkマスタの簡易設定の様子を動画で紹介します。
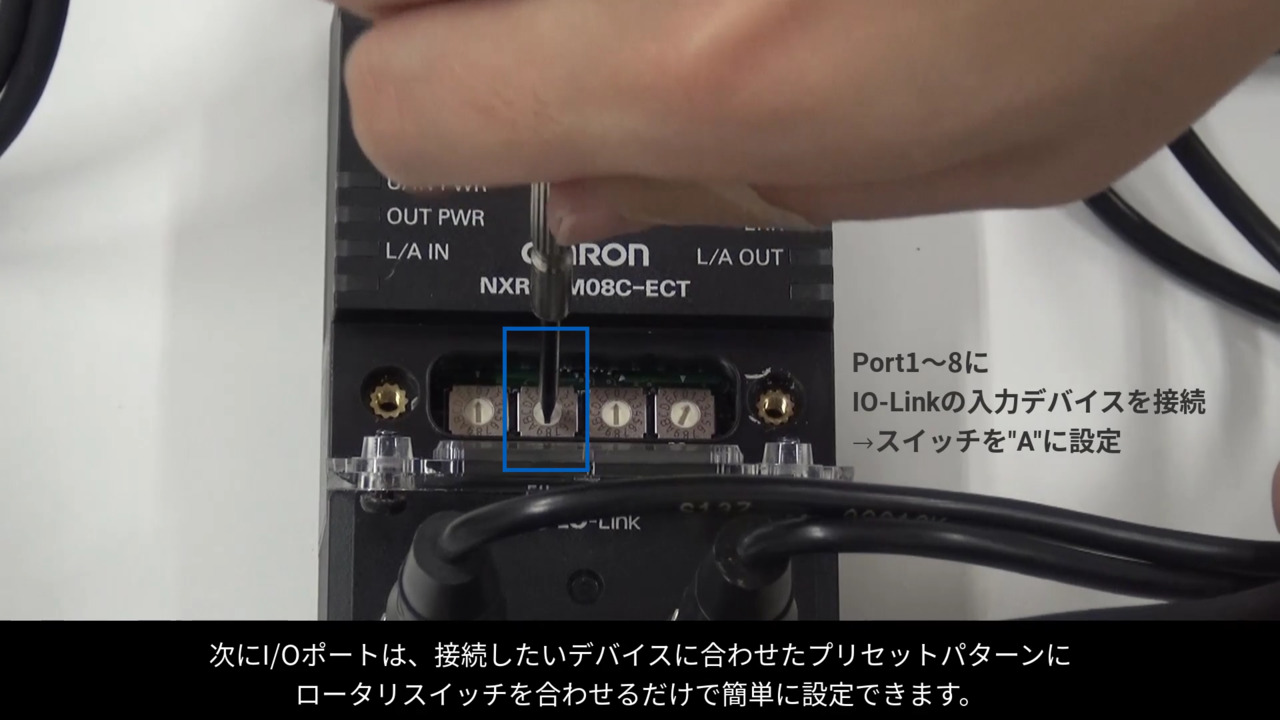
IO-Linkマスタユニット I/Oポートのクイック設定の様子を動画で紹介します。
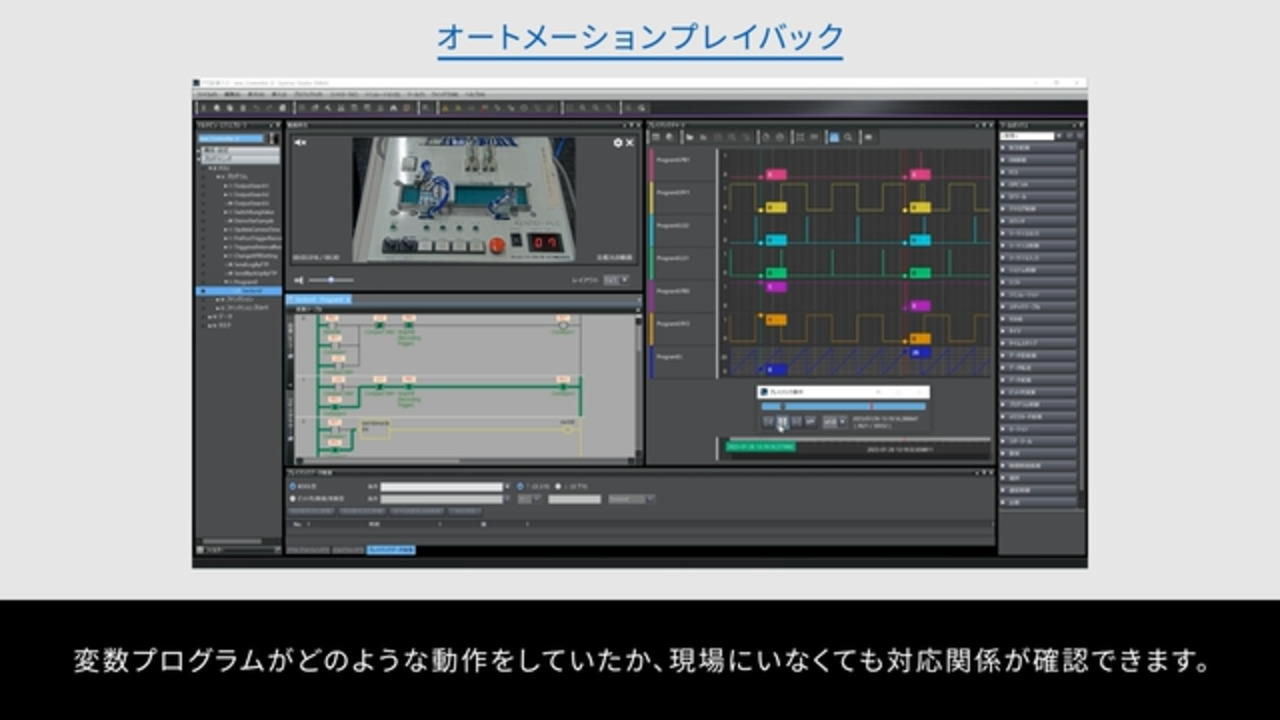
装置立上げ時の再現性の低い問題や、稼働中のトラブル原因究明時間を短縮する、NX5のオートメーションプレイバック機能についてご紹介します。
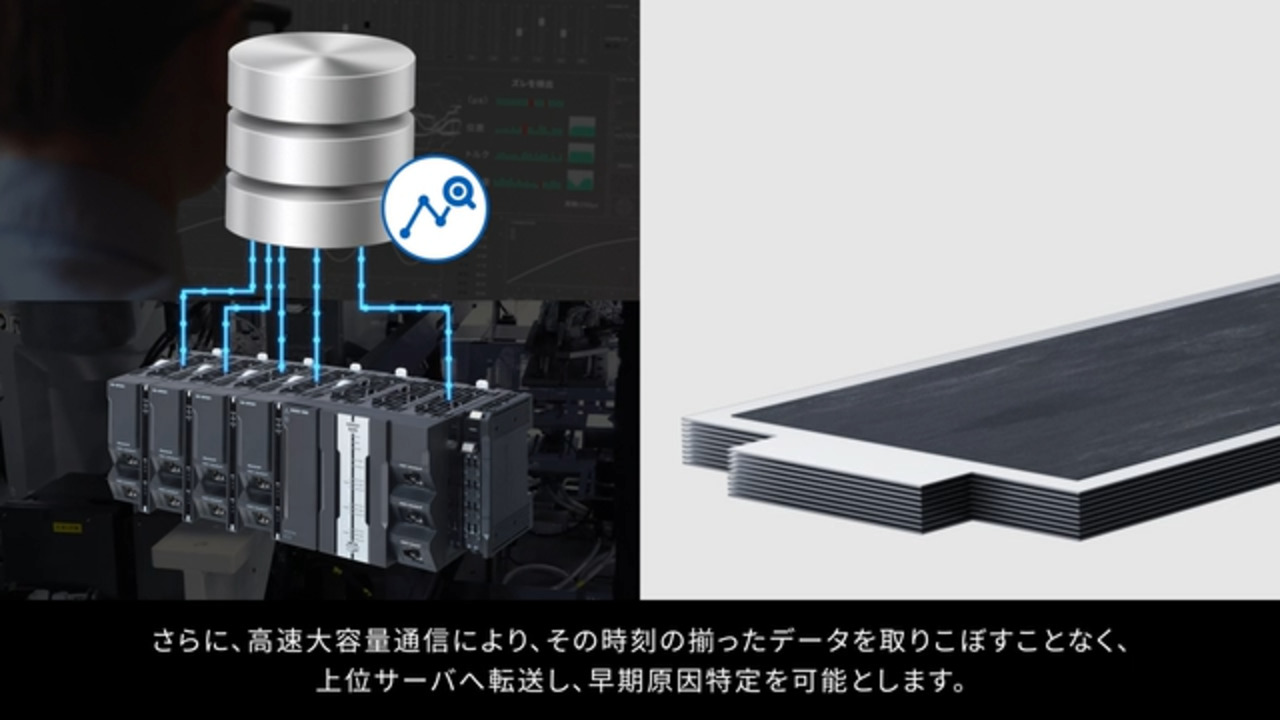
二次電池の積層工程を例に、オートメーションコントローラNX5で実現する「設備の高タクトと、高品質化を両立させるためのデータ活用」についてご紹介します。
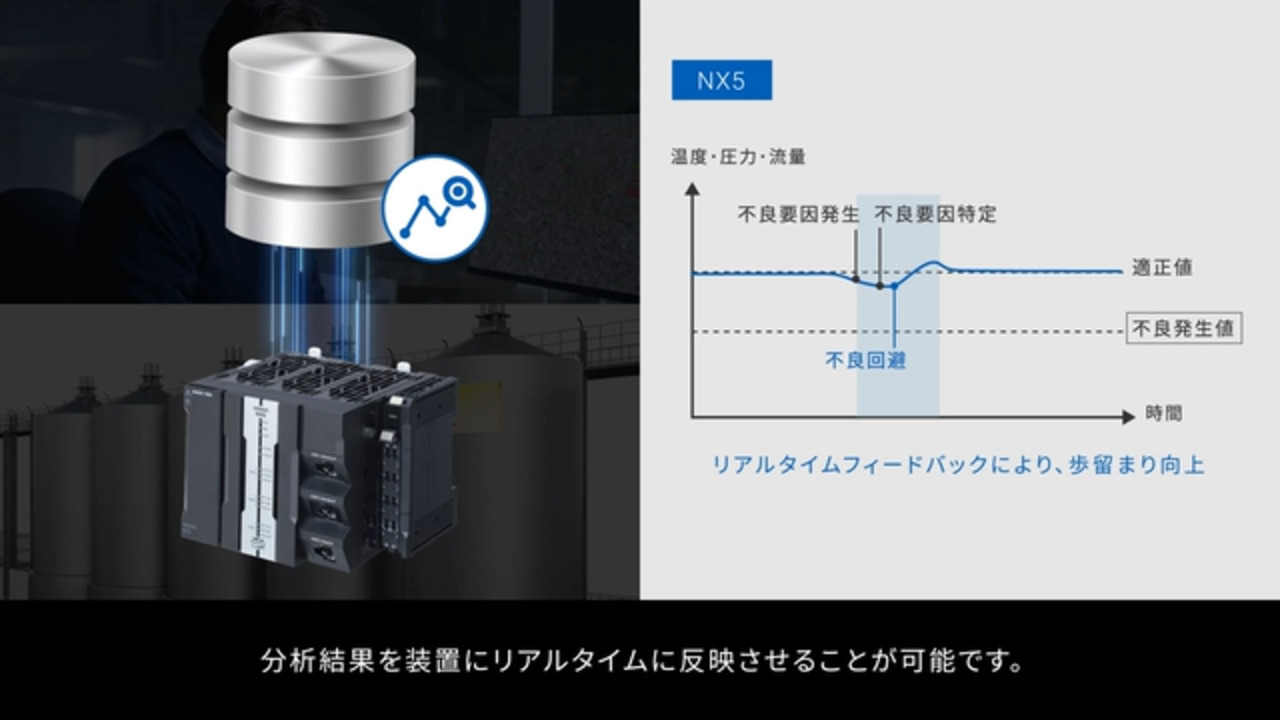
太陽光パネルの変換効率をあげるため、高品質な多結晶インゴットを生産することを例に、オートメーションコントローラNX5で実現する「歩留まり向上のためのデー...

需要変動時の、自動車の生産車種による工程追加を例に、「安全統合された高稼働率設備の実現」についてご紹介します。

Vetipak社の包装ライン自働化プロジェクトでのコラボレーションに対して、担当者が役割や協力関係に関して語っています。
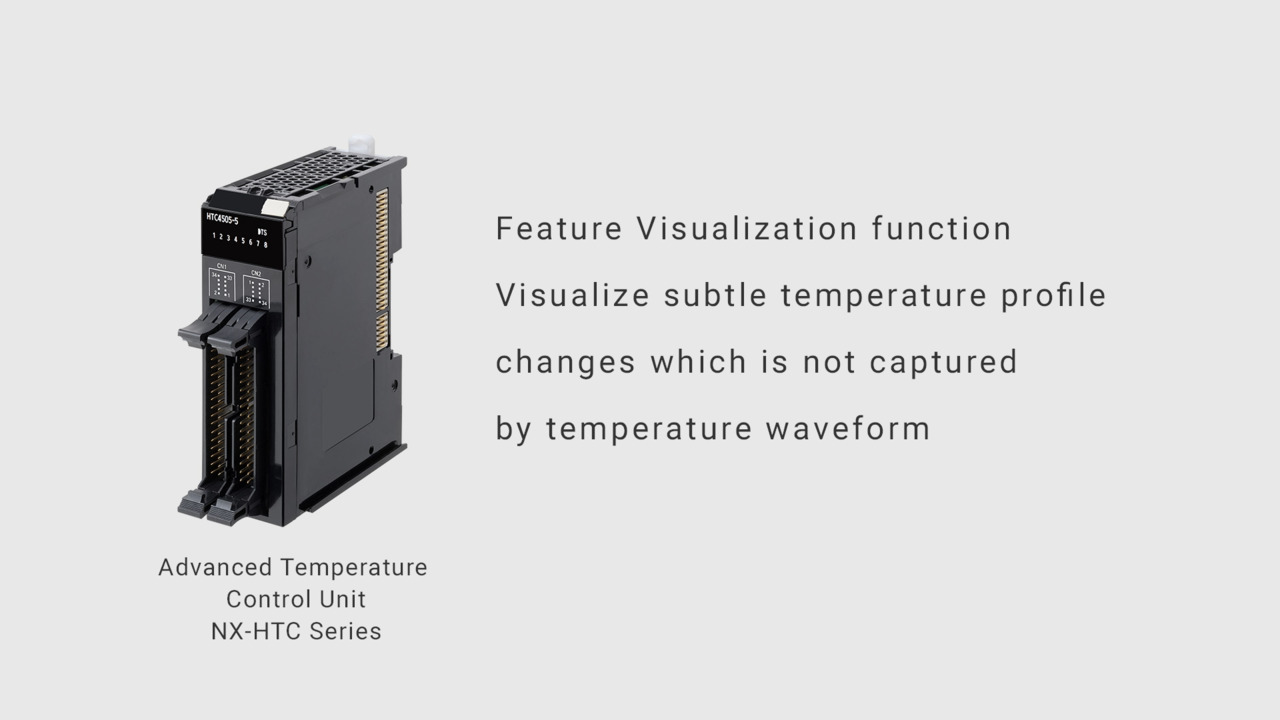
Feature Visualization function. Visualize subtle temperature profile changes which is not captured by temperature waveform.

温度の波形では捉えられない微細な温度プロファイルの変化を可視化する特徴量見える化機能について紹介します。
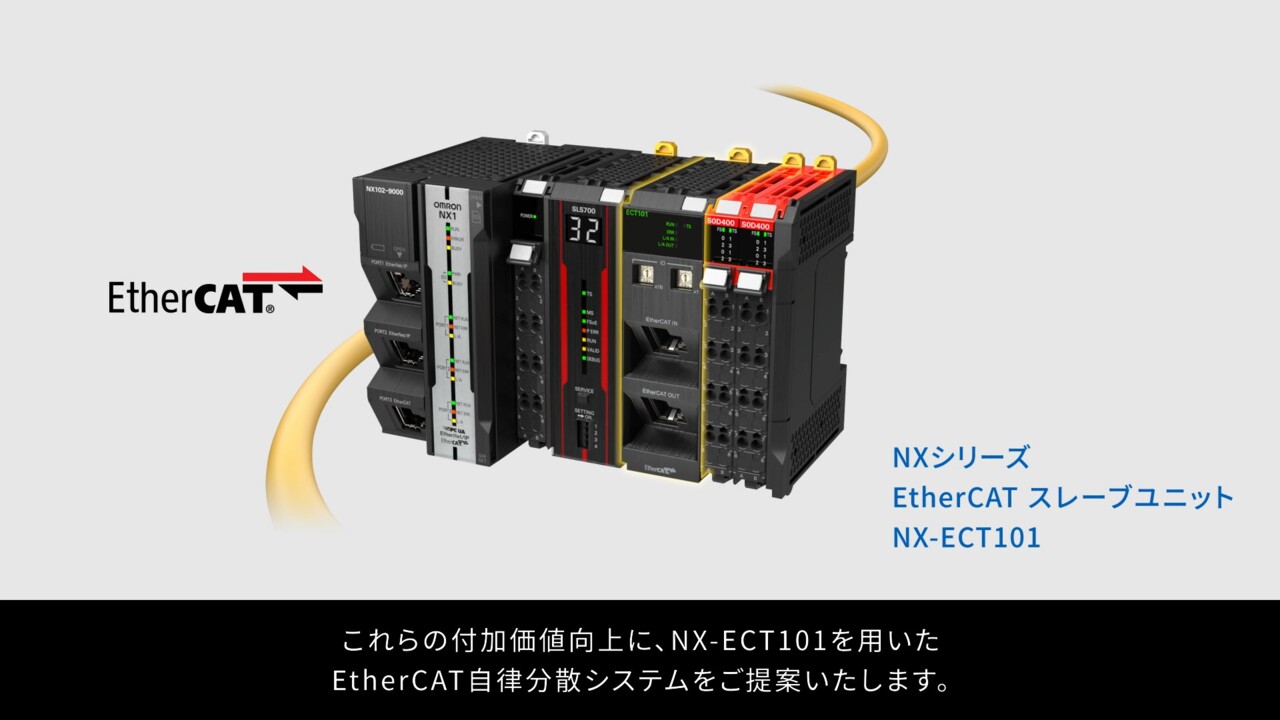
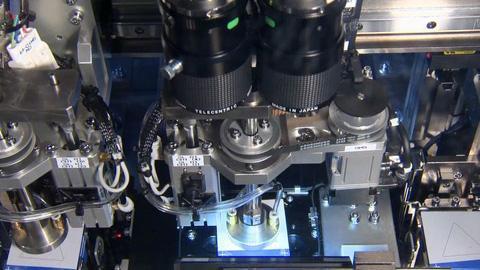
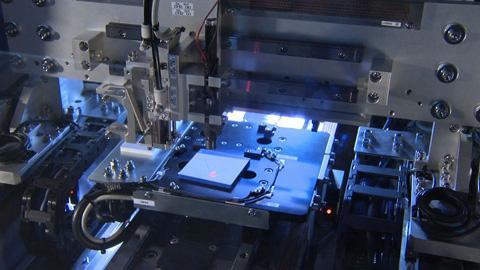
半導体製造装置の付加価値向上に、NX-ECT101を用いたEtherCAT自律分散システムをご提案いたします。
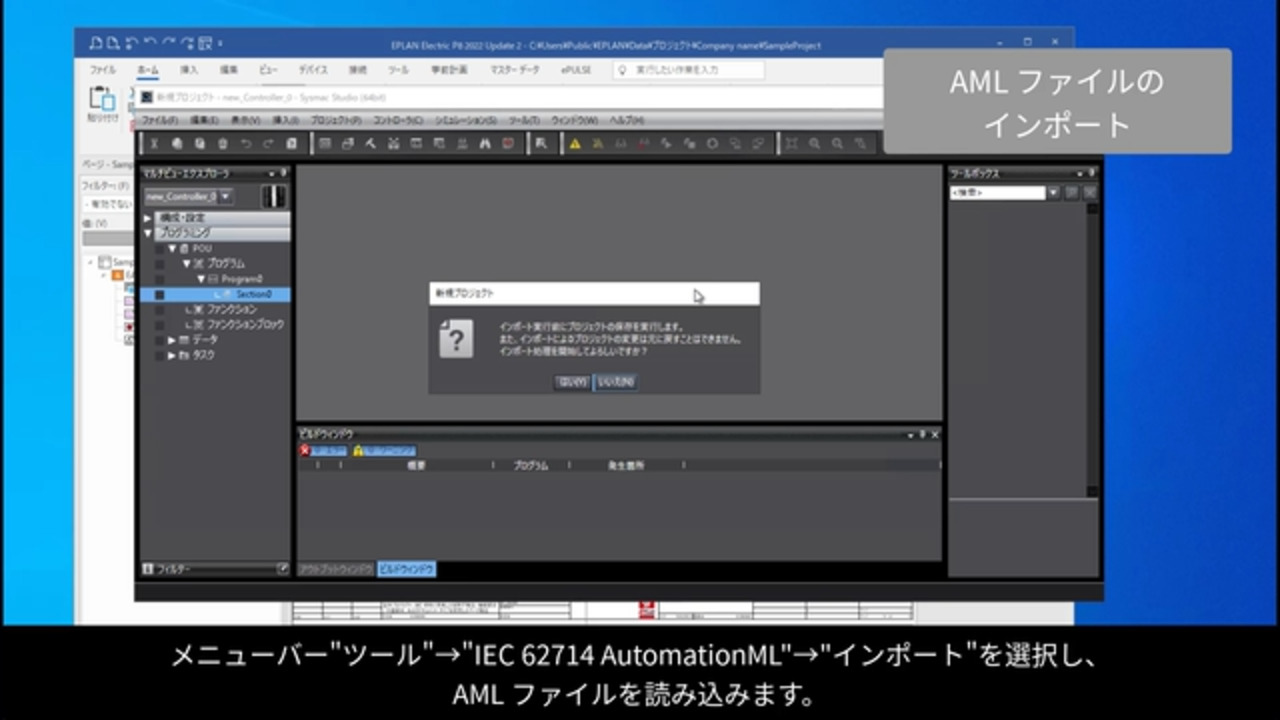
EPLANで作成した電気図面データから、ユニット構成とデバイス変数をSysmac Studioに取り込む手順をご紹介します。
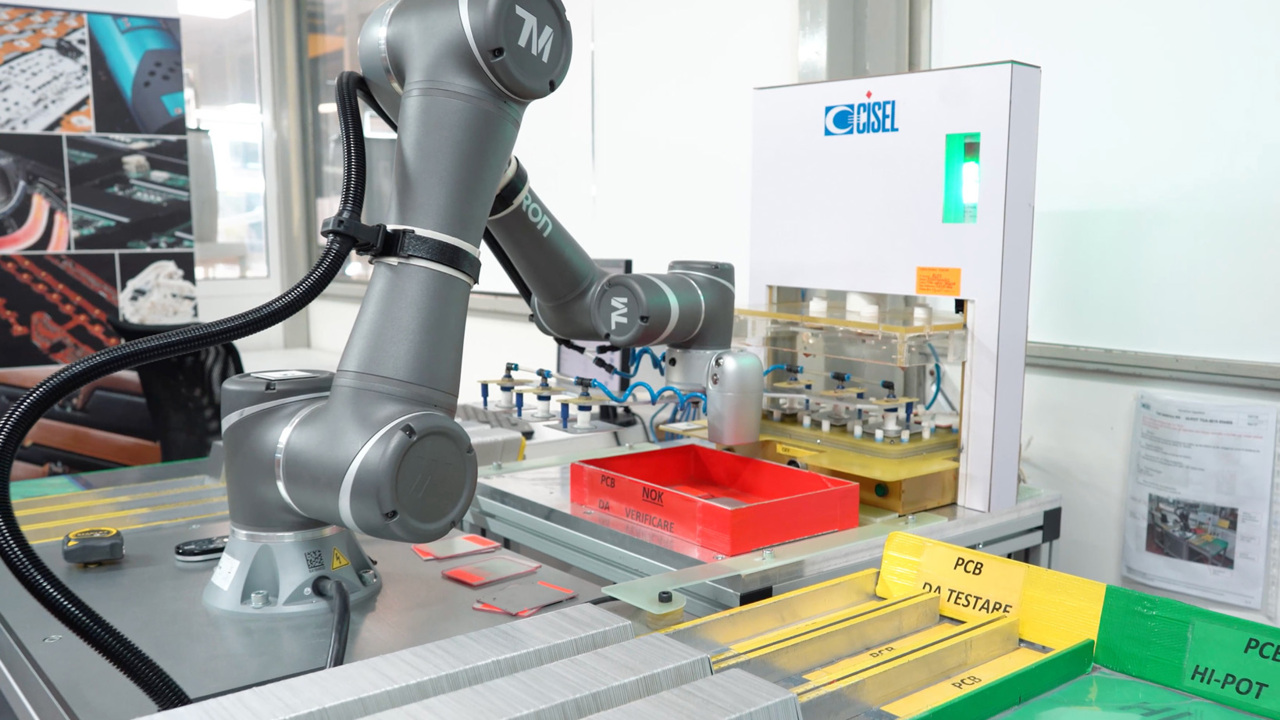
イタリアのCisel s.r.l.(以下CISEL社)が導入した協調ロボットの活用事例です。
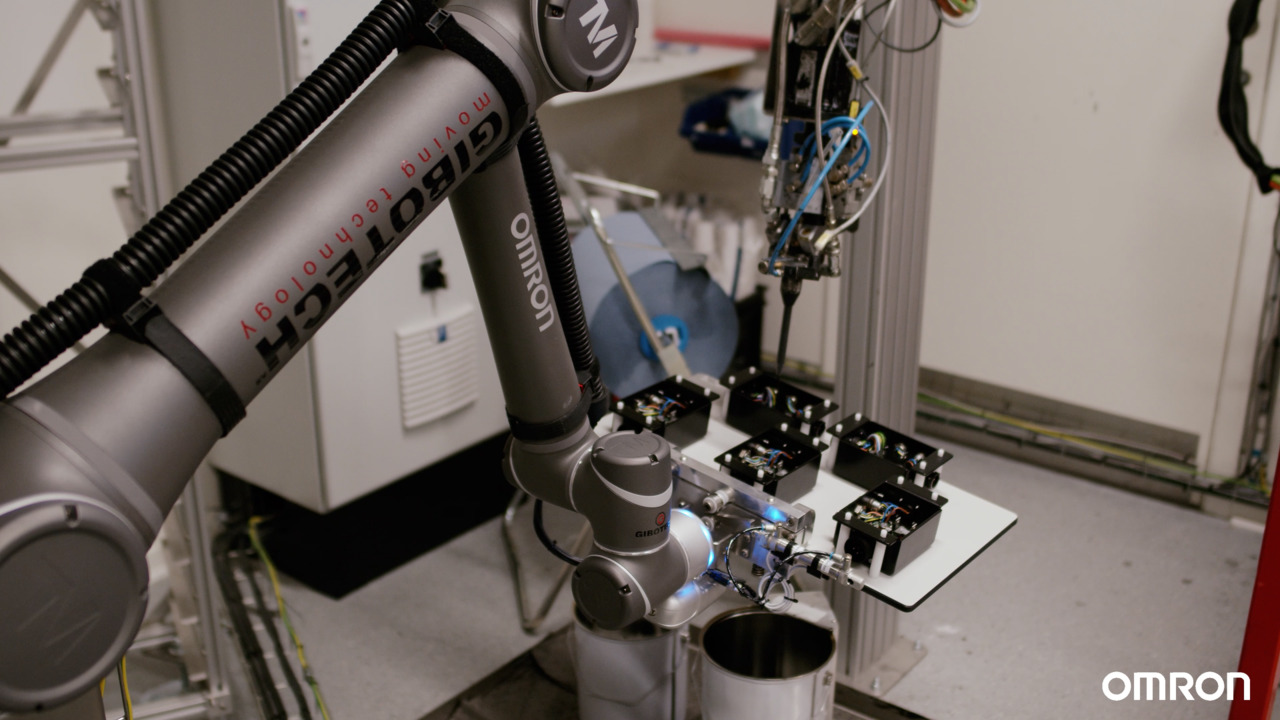
デンマークの Leica Geosystems社が導入したオムロンの協調ロボットによる樹脂充填と製品搬送を自動化した事例です。
院内薬剤部での、注射取揃え業務の約80%を自動化する「UNIPUL」(ユニプル)。製品コンセプトの企画段階から、現時点の成果までを伺いました。
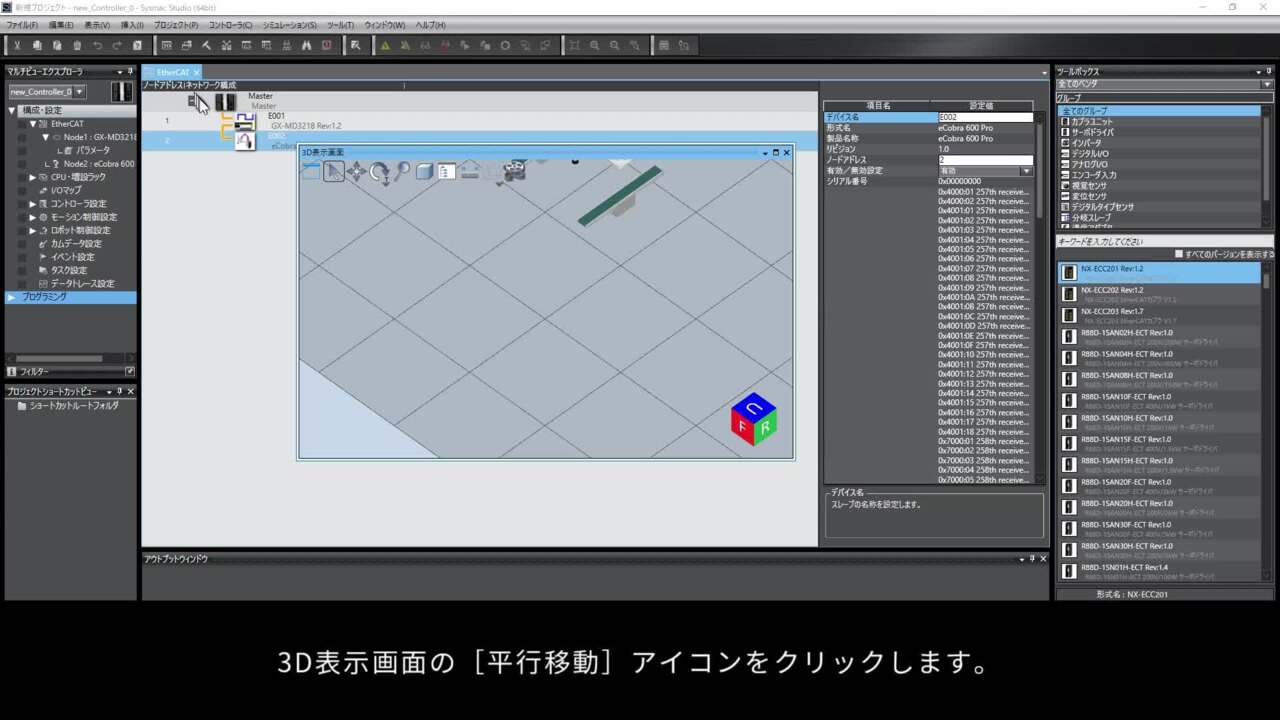
3D表示画面の視点を平行移動する操作を説明します。
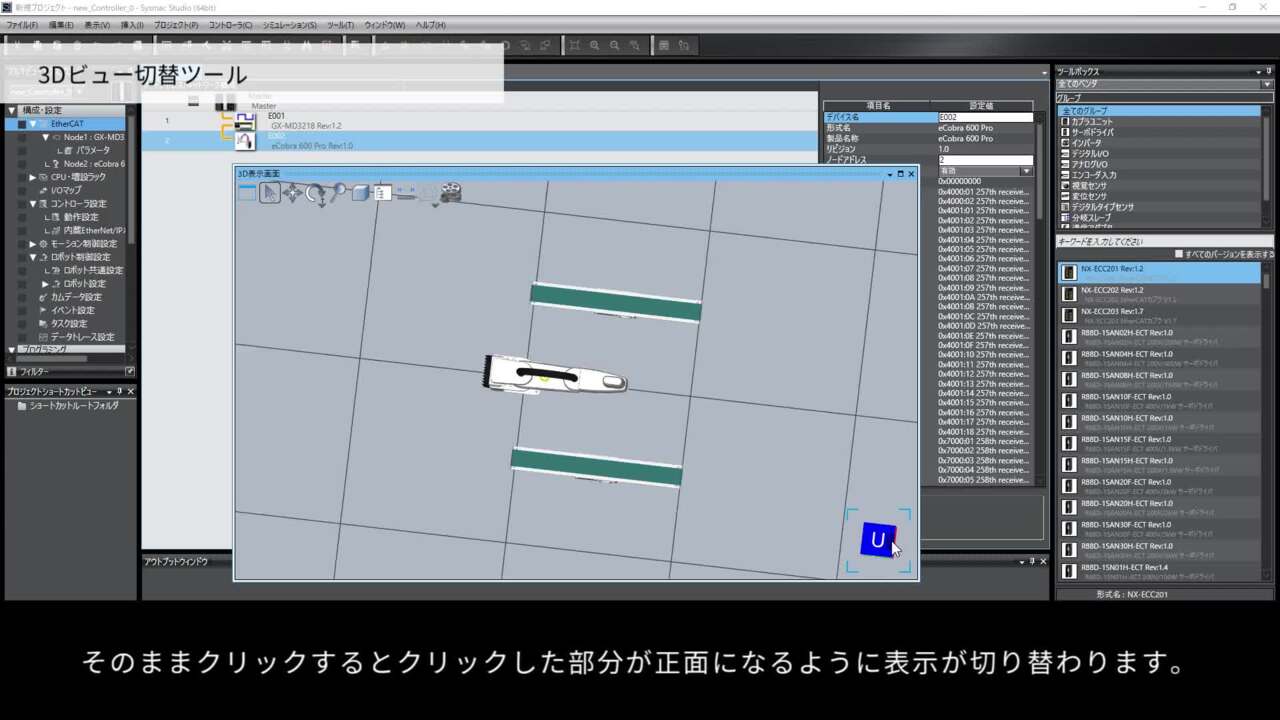
3D表示画面の視点を回転する操作を説明します。

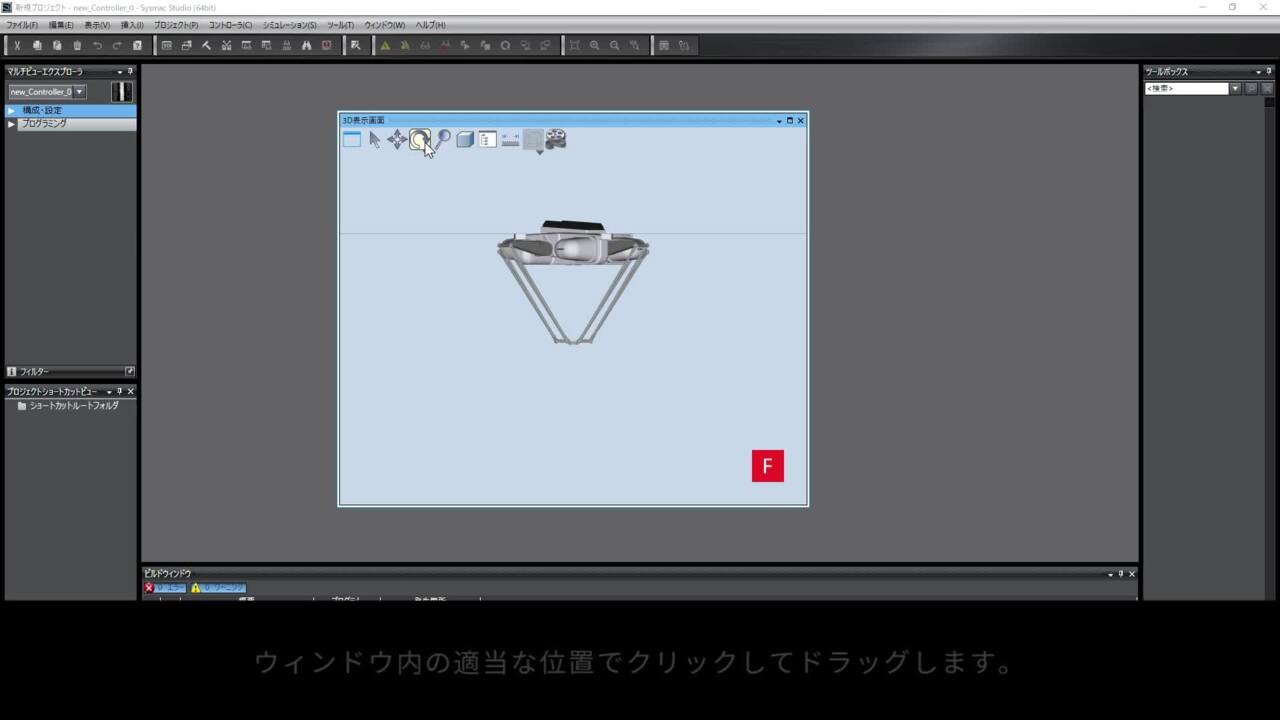
3D表示画面をズームインまたはズームアウトする操作を説明します。
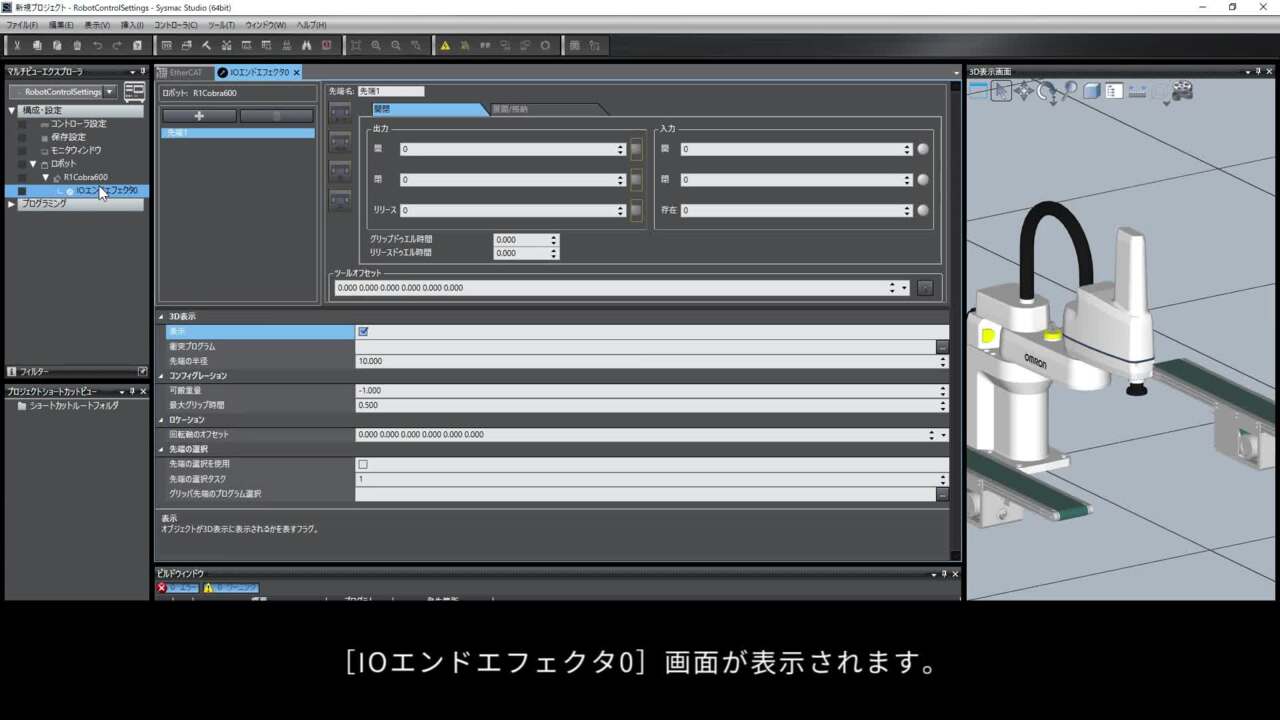
ロボットのエンドエフェクタの3D情報の設定手順を説明します。
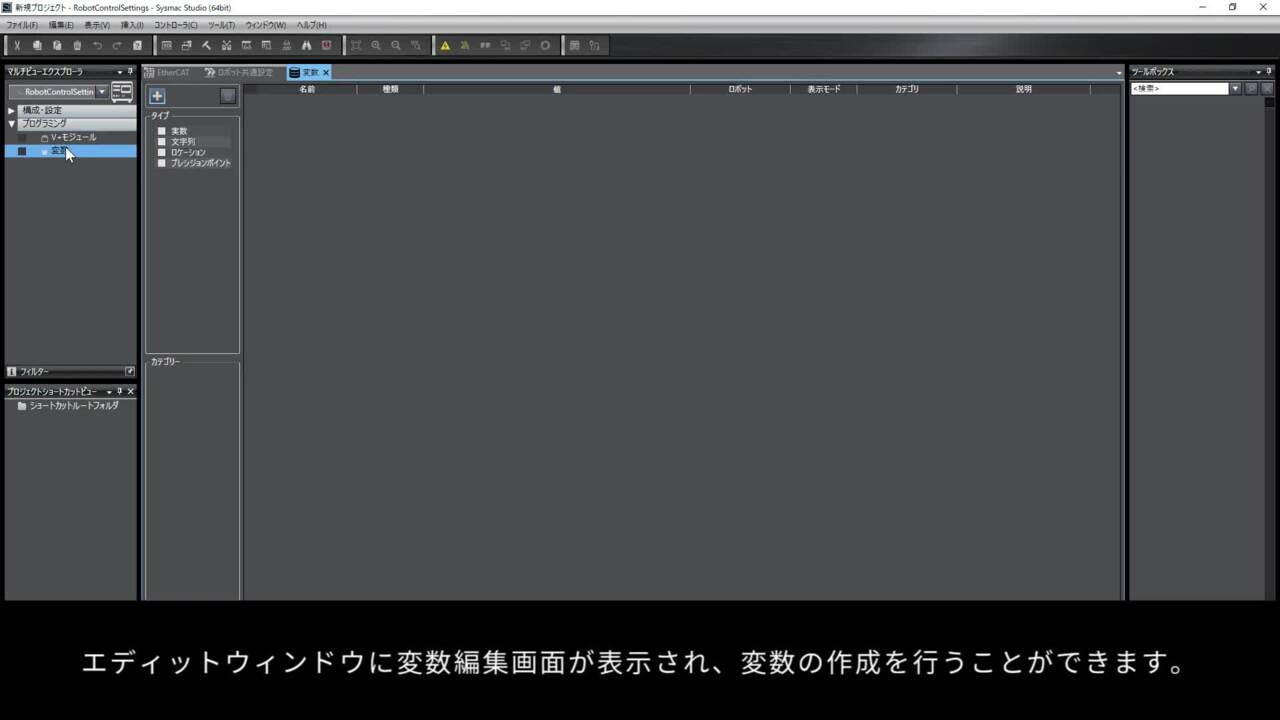
V+プログラムの作成手順を説明します。
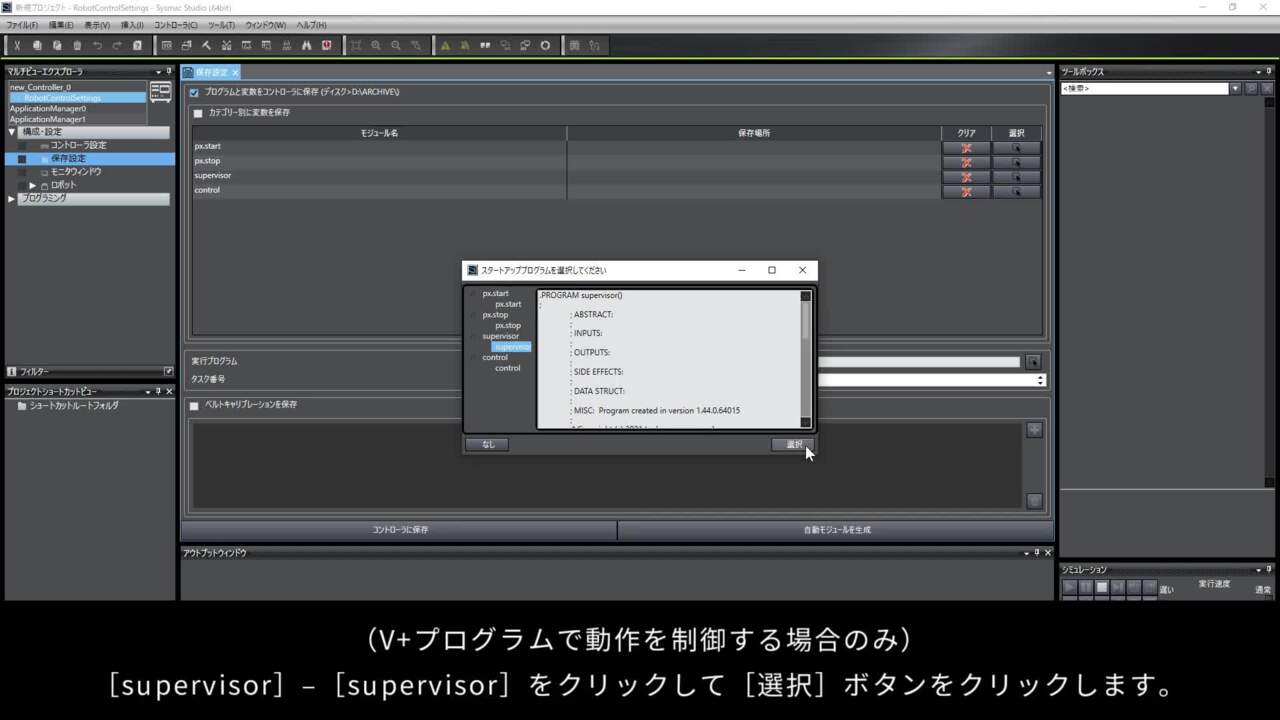
電源ON時にV+プログラムとグローバル変数を自動的に読み込むための設定手順を説明します。
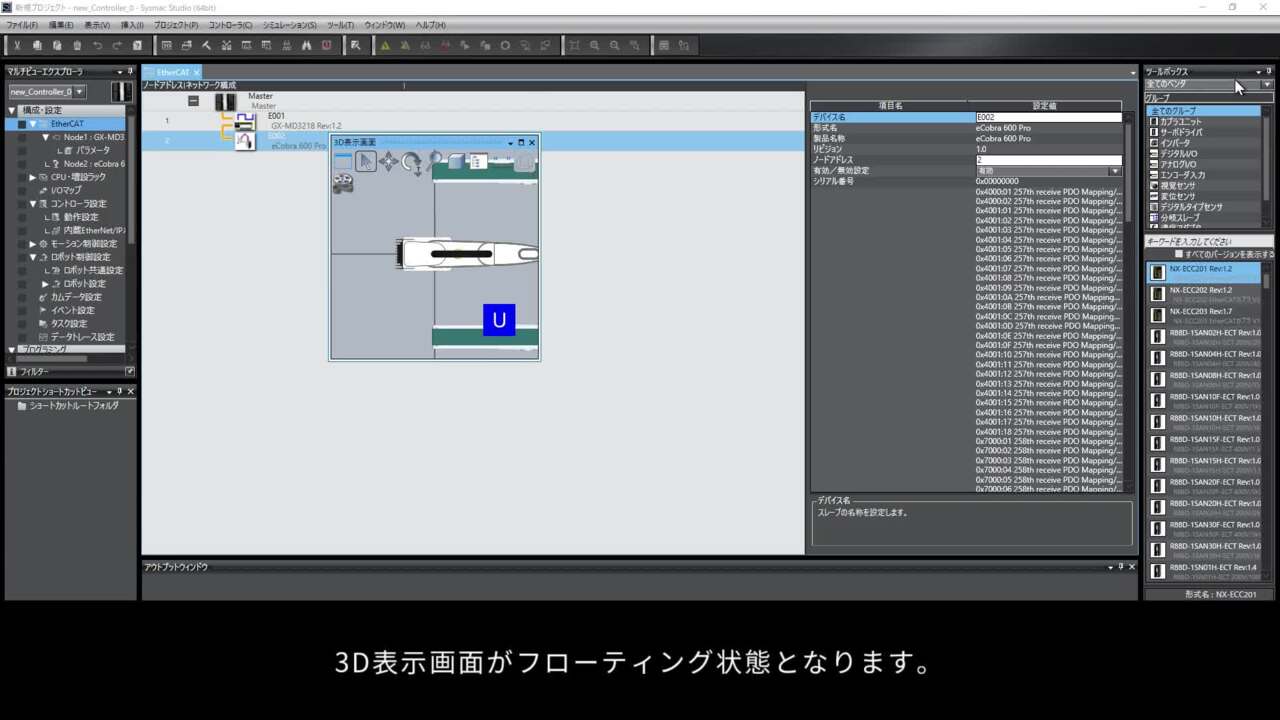
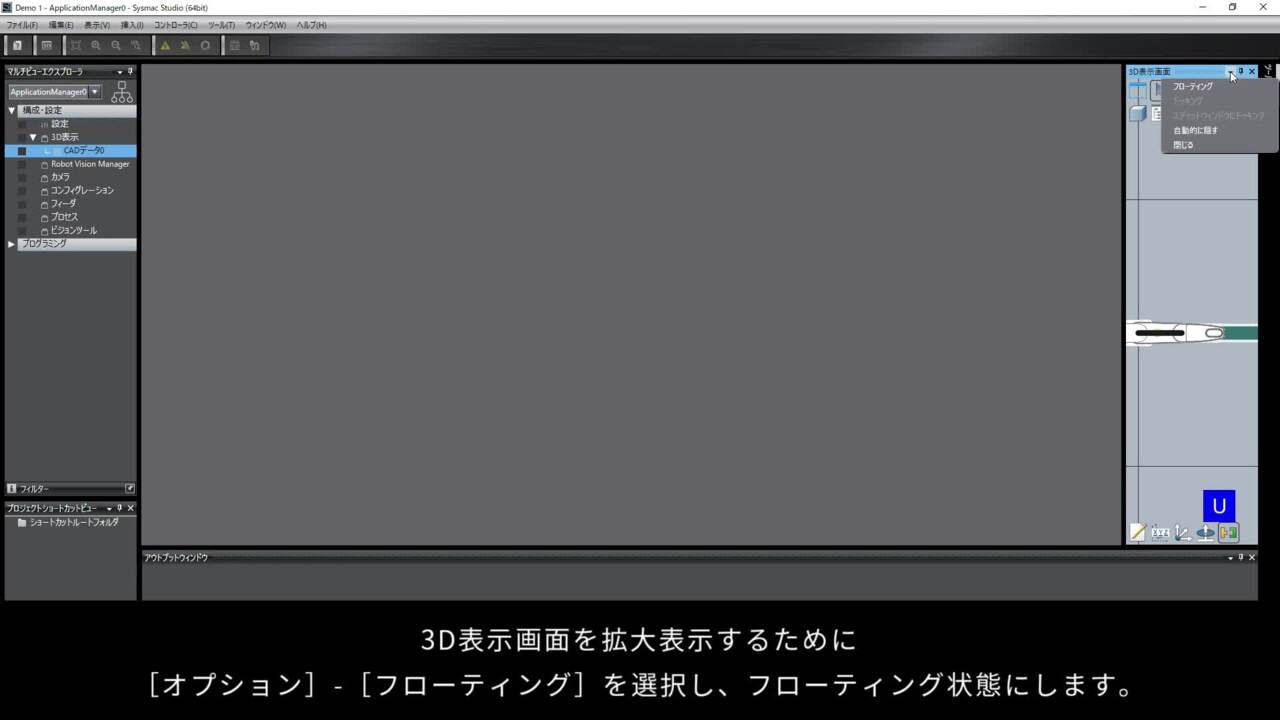
3D表示画面をフローティング状態にする操作を説明します。
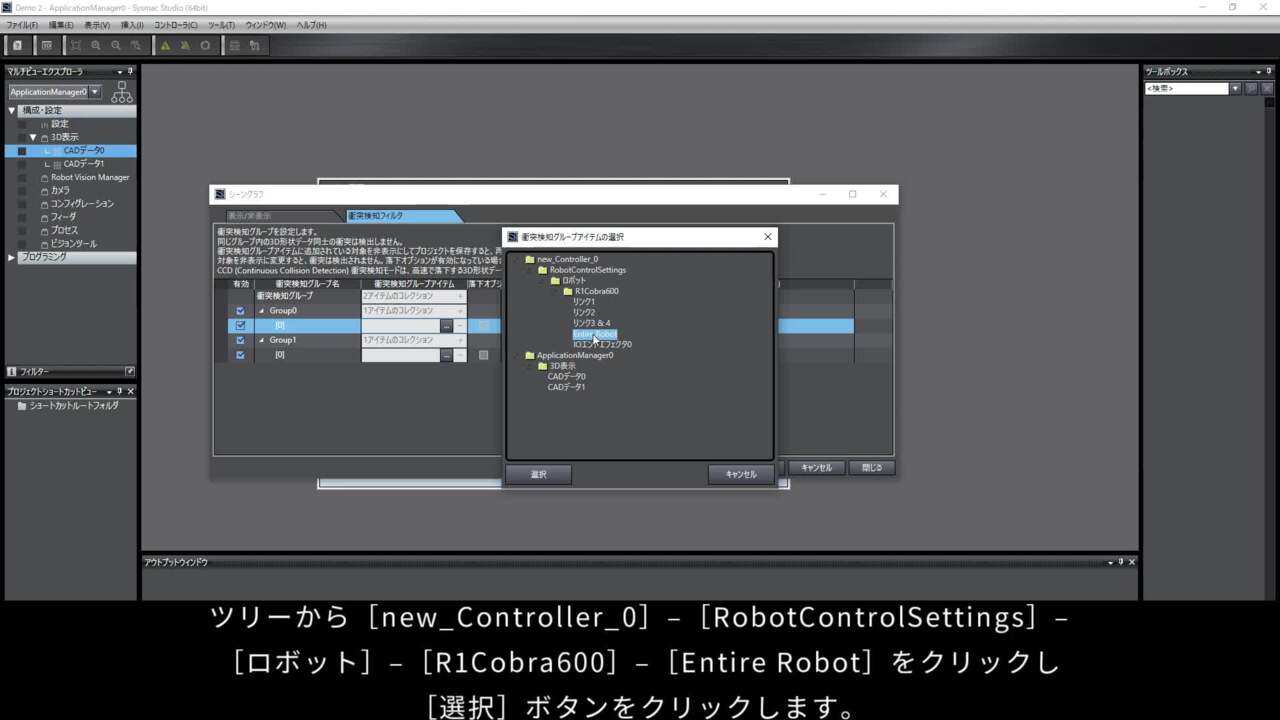
ロボットが、他の3D形状データと干渉する場合に、シミュレーションで検出できるようにする手順を示します。
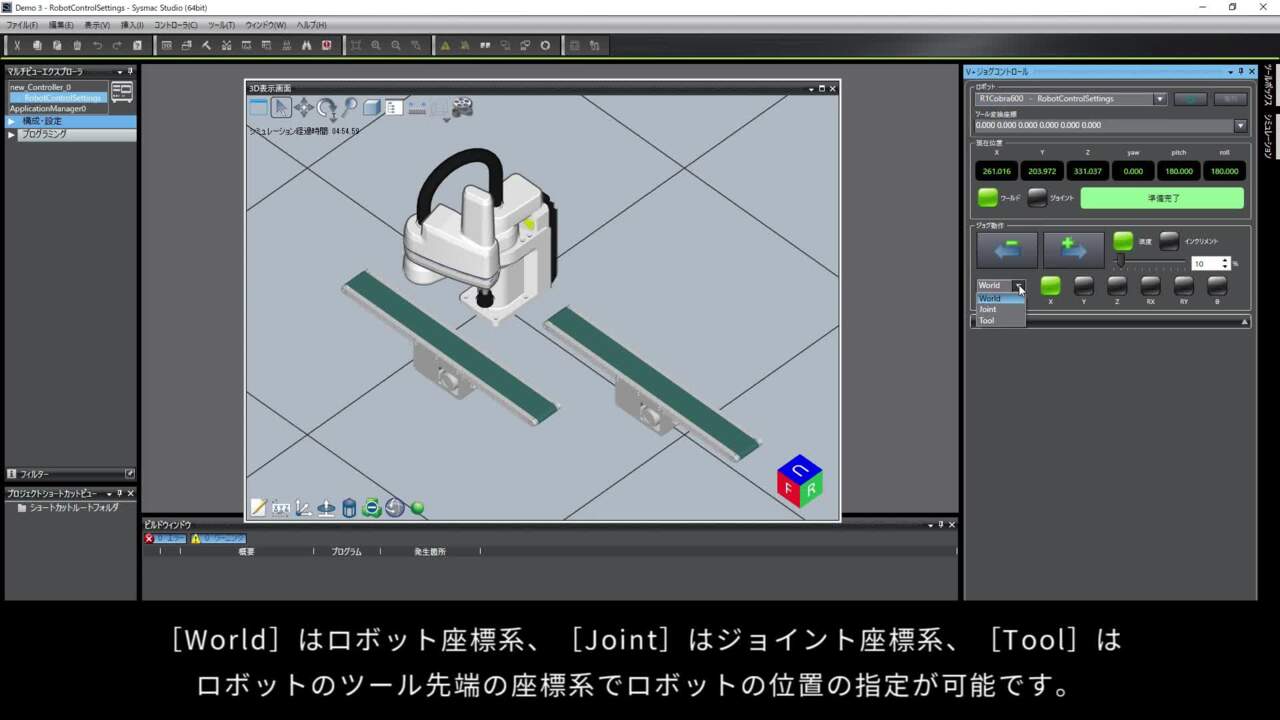
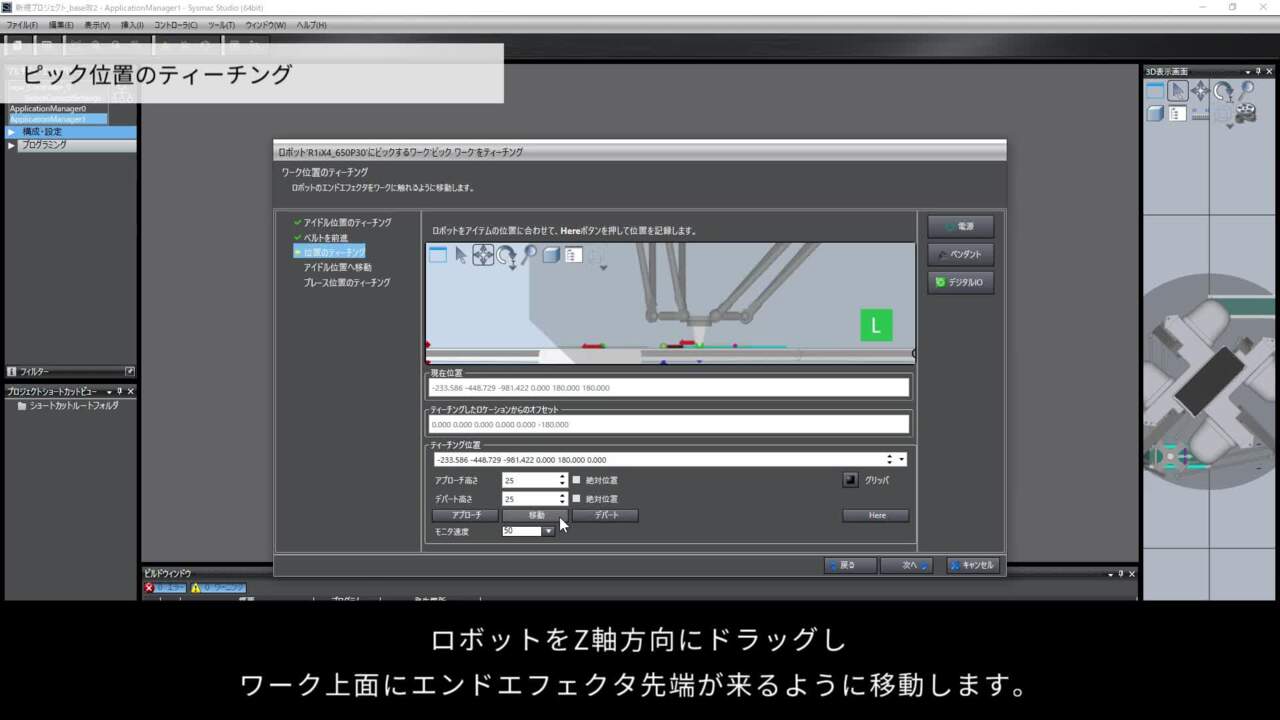
静的ピック&プレース装置の、ロボットの待機位置、ピック位置、プレース位置をティーチングする手順を示します。
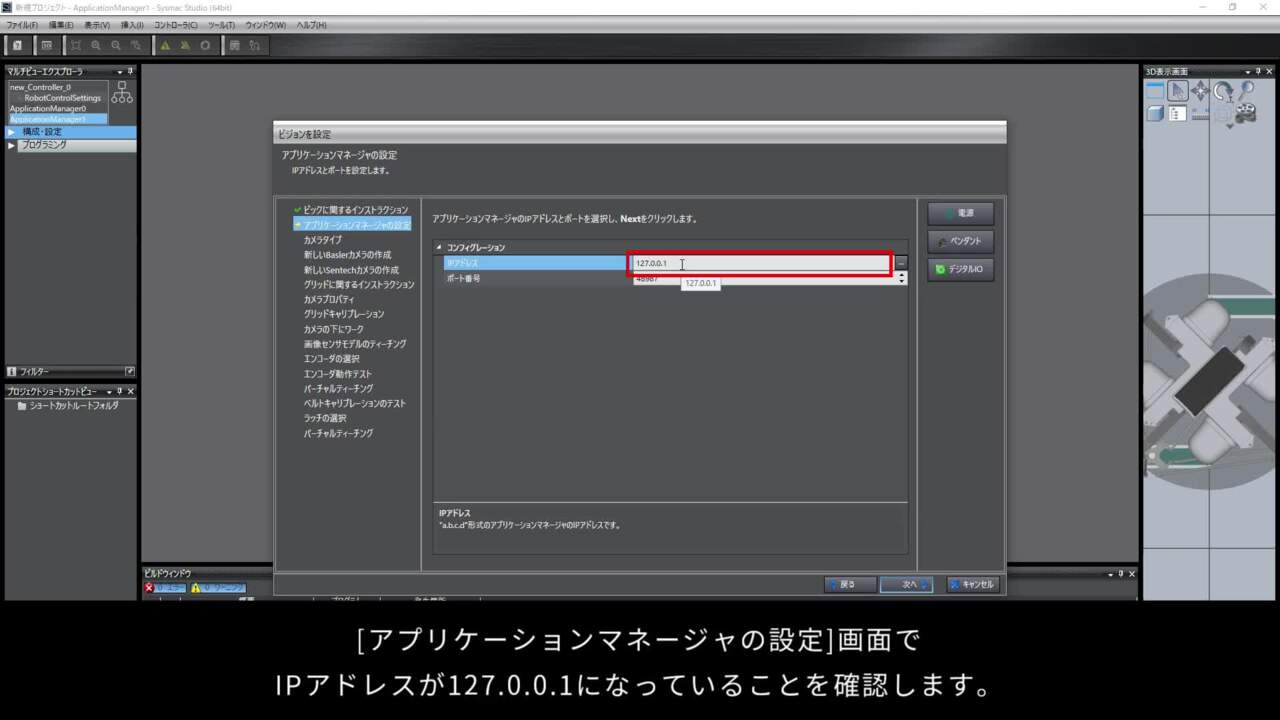
Sysmac StudioのPack Managerの機能を使用してシミュレーションで動的ピック&プレース装置を設定する手順を示します。
Pack Managerの機能を使用してシミュレーションで動的ピック&プレース装置のピック位置、プレース位置をティーチングする手順を示します。
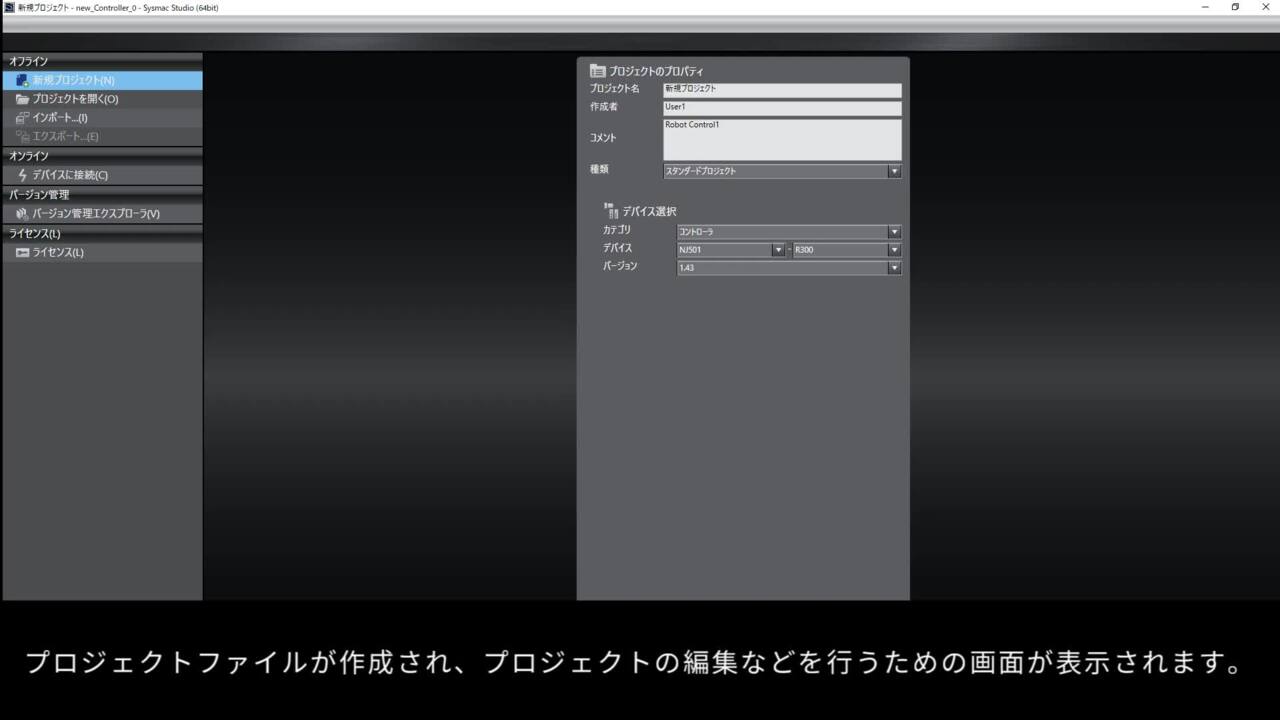
Sysmac Studioで新規プロジェクトを作成する手順を示します。
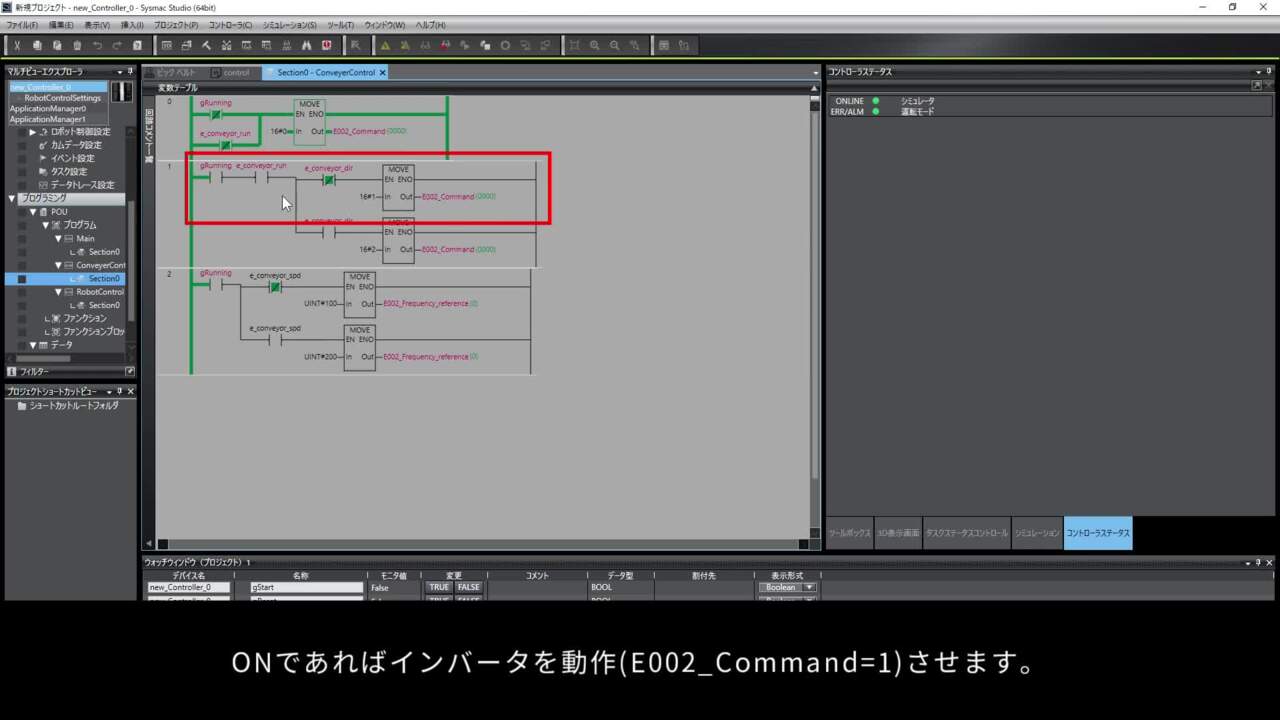
シーケンス制御プログラムの作成手順を説明します。
Sysmac Studioのシミュレーション機能を使用してロボットの動作を確認する手順を示します。
シミュレーションでProcess Managerとラダープログラムが連動して動作していることを確認できます。
Sysmac Studioで3D形状データを配置する操作を説明します。
Sysmac Studioに3D CADデータをインポートし、3D表示画面上で適切な位置に配置する手順を示します。
Introducing the cable redundancy function that does not stop machines and lines without compromising the high speed and high accuracy of EtherCAT.
EtherCATの高速性・同期性を保ちながら、装置やラインを止めないケーブル冗長性機能をご紹介します。
SysmacStudioでコントローラの運転中にプログラムを書き換える様子をご覧ください。

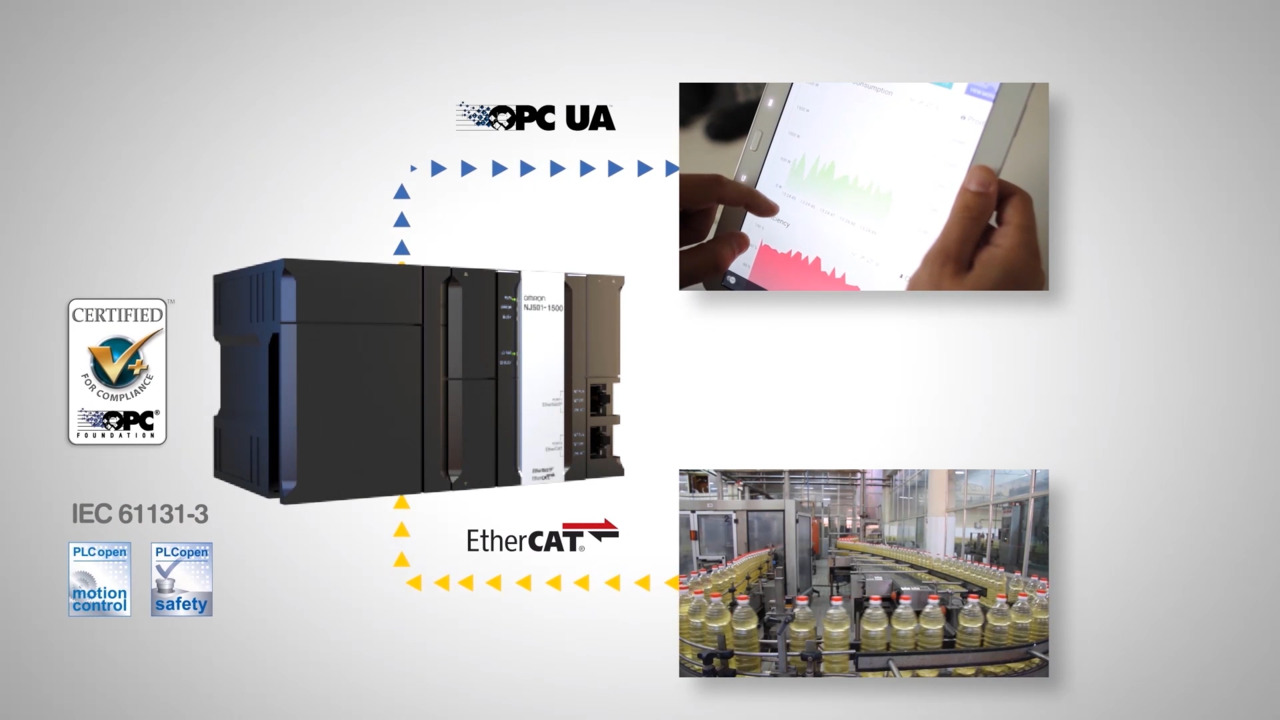
マシンオートメーションコントローラ NX1シリーズは、モーション・ビジョン・セーフティを統合し、EtherCATやOPC UAなどネットワークのインターフェースを備えて...

高機能モーション制御も、現場発のIoTを実現するネットワークも、ワンパッケージに凝縮したSysmacコントローラのエントリーモデルです。

オムロンの草津工場(滋賀県)では、データを活用して品質データを収集する取り組みを行った結果改善ポイントの発見が早くなり、生産性が向上しました。
長さの異なるロッドの先のピンポン玉の揺れにご注目! 制振制御ファンクションブロックにより、搬送時に発生する複数周波数の振動を抑制し高速搬送を実現します...

制振制御ファンクションブロックにより、搬送時に発生する複合共振の振動を抑制し、高速搬送を実現します。

アーム先端の揺れにご注目!振動抑制ファンクションブロックにより、動作時の振動を抑制し高速搬送を実現します。

パウチパック内の液体の停止時の揺れにご注目!振動抑制ファンクションブロックにより、動作時に発生する振動を抑制しながら高速搬送を実現します。

搬送時に発生する筐体の揺れにご注目!制振制御ファンクションブロックにより、搬送時に発生する搬送物と機械筐体の振動を同時に抑制し高速搬送を実現します。

搬送されたガラス板の停止位置のずれにご注目!振動抑制ファンクションブロックにより、動作時に発生する振動を抑制しながら高速搬送を実現します。
連続的にワーク位置を検出し、目標位置までの移動距離を逐次更新することで、ワークを停止させずに高精度な位置決めを行います。従来のアライメント制御から位置...

One Connection、One Software、One Machine Controllerを実現。

最適なマシン制御を実現、生産性を高める革新的テクノロジをご提供。
理想軌跡と計測軌跡からオフセット補正とフィードフォワードによる補正。 高速動作時の軌跡逸脱を考慮した2種類の位置指令により、軌跡制御の高精度化を実現し...
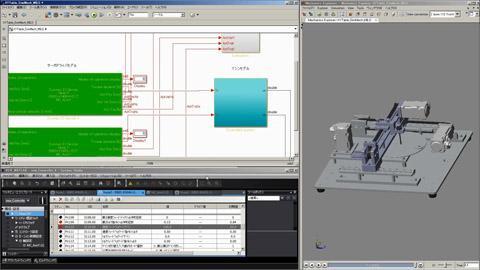
3Dグラフィックを使った仮想開発環境で、サーボの遅れ、荷重、摩擦などの影響まで制御の余裕度を確認することができます。
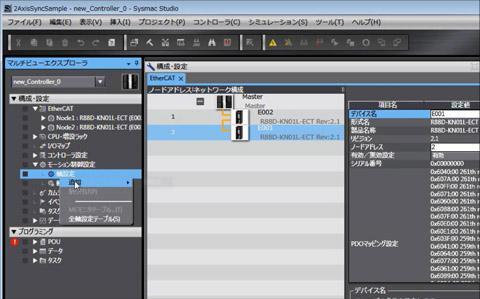
PLCopen®の「軸」を使うことによりモーション制御の設定が用意になる事例です。
iCAD上で機械動作を再現することにより、現地に出かけていったのと同じ条件で動作検証が行えます。

Sysmacは包装に求められる機能の統合制御を実現します。

振動抑制ファンクションブロックによって、動作時に発生する振動を抑制しながら高速搬送を実現します。

コップの水面にご注目!振動抑制ファンクションブロックにより、動作時に発生する振動を抑制しながら高速搬送を実現します。

鉄板の揺れにご注目!振動抑制ファンクションブロックにより、動作時の振動を抑制し高速搬送を実現します。

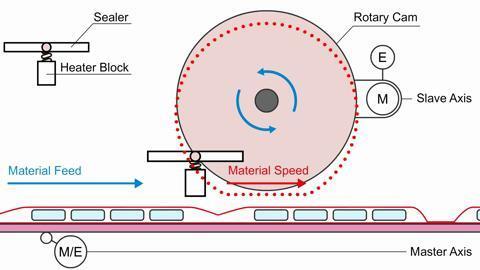
包装機制御に必要となるロータリナイフの演算処理をファンクションブロック。電子カム演算方式を用いた可変長切断制御を実現します。
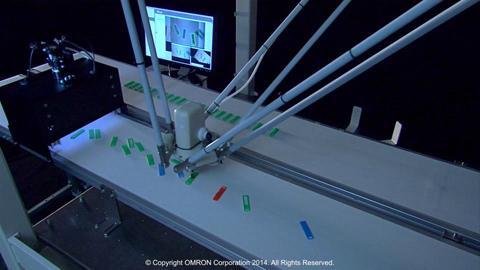
NJロボティクスと画像処理、パラレルリンクの座標演算、サーボモータを高速高精度に制御し、多品種・変量生産に適した仕分け・整列制御をおこないます。

汎用コントローラによるパラレルリンクロボット制御で賢く柔軟な搬送システムを実現します。Sysmacは画像処理・パラレルリンクの座標演算・サーボモータを高速高...

2連パラレルロボットを制御する統合コントローラ機能に注目!Sysmacはコントローラ1台でパラレルリンクロボット最大8台まで制御可能。EtherCATによる、入出力...

Sysmacは、搬送・包装・検査・仕分けの出荷検査ラインにもとめられる機能を統合制御 画像処理・座標演算・モータを統合制御が可能です。 さらに複数工程を同期し...
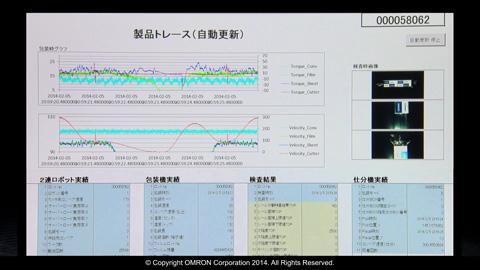
現場のビックデータ活用による品質改善、さらには予兆保全に貢献します。

SECS/GEMコンフィグレータで、通信設定をプログラムレスで実現します。
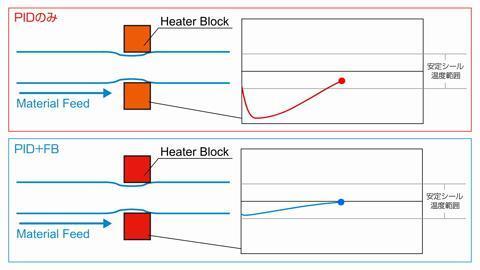
包装の開始停止時におこるシール温度変化を抑制し、包材消費や温度安定待ちなどの無駄を削減します。
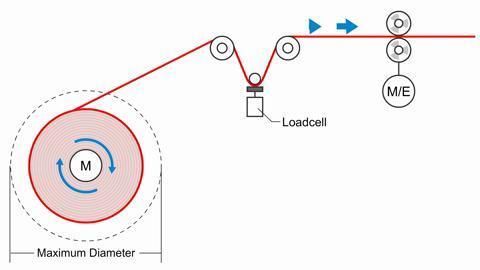
連続包装材を巻き取る(巻取り装置)または巻き出す(巻出し装置)際のテンション制御をご覧いただけます。
高品質シールと高速包装を支えるボックスモーション機構。モータ制御に必要となる複雑な演算による動きをご覧いただけます。

装置動作中に、近づいたり、ドアを開けようとすると装置が緊急停止し表示器NBの画面上で安全機器のステータスを確認できます。表示器から装置の運転・停止・リセ...
撹拌機、切断機(スライサー)、カシメ機など危険な箇所がある装置には安全対策が不可欠です。セーフティコントローラG9SPからマイクロPLC CP1Eに安全情報を通知...

ガントリ機構におけるスムーズな双動動作にご注目!電子カム機能、追従同期制御もご覧いただけます。

変動する共振振動に対応した制振制御にご注目!制振制御あり・なしで比較してご覧いただけます。

トルク制御サーボプレスにおける最適な制御パラメータの組み合わせ。位置・速度・トルク制御を停止することなく切り替え可能。

巻き取り装置は「早く」「きれいに」巻き取ることを要求されます。「テンション・蛇行抑制・高速化」の重要3要素をオムロンのマシンオートメーションコントローラ...