課題
過酷な作業から作業者を解放し、労災削減‧労働環境を改善
人手による荷積み‧荷降ろし作業には、作業者へのRSI*等の疲労障害発生リスクがあります。その有力な対策として、ロボットを活用した自動化があります。しかし、既存設備やスペースの制約から、ロボットの導入に欠かせない安全柵設置やレイアウト変更などの現場改造が困難なケースがあります。
コロナ禍を契機に、作業者の密集をなくすための方策が必須になりました。作業者が集まり、人手で行う荷積み・荷降ろし作業は、あらゆる現場で自動化が求められ、より広範な場所で活用可能なロボットが必要になります。ここで課題となるのが、導入するロボットの荷積み能力と安全性を両立することの難しさや、箱サイズ‧積上げる高さなど環境変更に応じて都度発生する再設定の工数です。
*RSI:Repetitive Strain Injury 体の特定部分に繰り返し負荷がかかることで起きる、痛みや炎症などの諸症状
解決策
人と協調できるロボットなら現場改造が不要*1。荷積み・荷降ろし作業を簡単に自動化
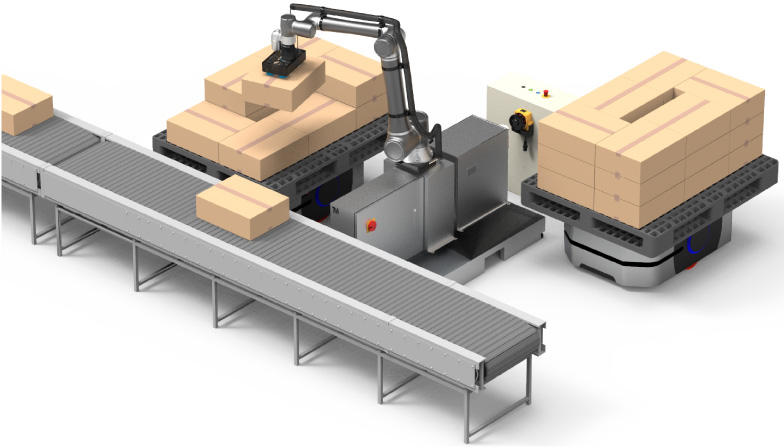
協調ロボットを活用し、荷積み・荷降ろし作業を自動化。あわせて、パレタイズした後の搬送もモバイルロボットで自動化
作業者へ無理な姿勢を強いたり、疲労障害につながりやすい作業を、ロボットにより自動化します。ただし、産業用ロボットの場合、人との接触を避けるための安全柵や複雑な安全対策、広い設置スペースが必要になります。また、安全上、教示作業には監視に専念する作業者を配置させる「2人作業」が推奨されています*2。
協調ロボットなら、リスクアセスメントの実施のもと、安全対策を施すことで、安全柵の設置が不要。人が作業するスペース内へ協調ロボットを設置・導入でき、積荷のサイズ変更などにも簡単に対応できます。
*1:既存設備の仕様により、最小限の改造が必要な場合があります。詳しくは担当営業にご相談ください
*2:中央労働災害防止協会“産業法ロボットの安全必携”より

協調ロボットなら、従来からの作業場所にそのまま導入可能

積荷サイズなど設定変更にも柔軟に対応でき、導入後の運用も簡単
オムロンだからできること
人の介在度合いに合わせ、安全性を担保しながら荷積み能力を最大化。
ロボットと、安全機器や専用ソフトウェアを組み合わせ、安全と生産性を両立
オムロンなら協調ロボットと、自社のセーフティレーザスキャナなど安全機器や画像センサを摺り合わせ、安全性と生産性を両立します。
導入後、積荷の変更時に必要な設定変更もウィザード形式で簡単に設定できる専用ソフトウェアも提供し、お客様の工数削減を実現します。
さらに、パレタイズした後のパレット搬送も、オムロンのモバイルロボットで自動化。配送工程においても、作業者負担を軽減できます。
-

セーフティレーザスキャナが設備周囲の作業者を検出。作業者の介在度合いで協調ロボットの運転モードが自動的に切り替わり、最適なスピードで動作 -

パレタイズした後の搬送も、モバイルロボットで自動化。重量物の搬送など、作業者負担も軽減
解決への実現方法
Point.1
人と協調できるロボットで既設ライン改造なしに荷積みを自動化RSIによる疲労障害を防ぎ、作業者の方が生き生き働ける現場を実現
パレタイジング工程は稼働範囲が広く必要であったり、重いものを持つ必要が生じるため、大型の産業用ロボットが使われていますが、この場合、人との接触を避けるため、安全柵が必要になります。
一方、協調ロボットTMシリーズは、リスクアセスメントを実施し、安全対策を行うことで、安全柵の設置などの工事が必要なく、人が積み上げを行うスペースを利用して、自動化できます。
Point.2
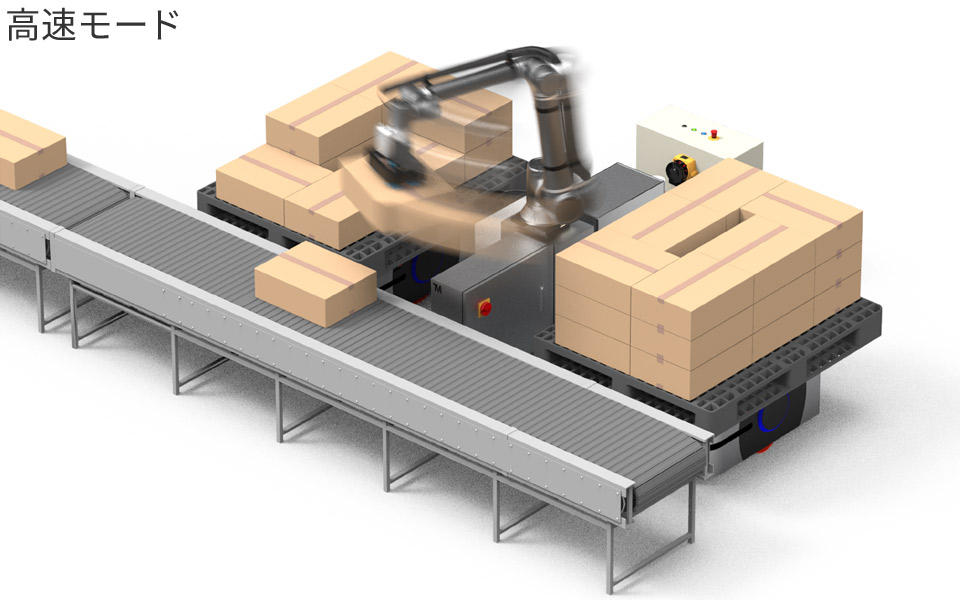
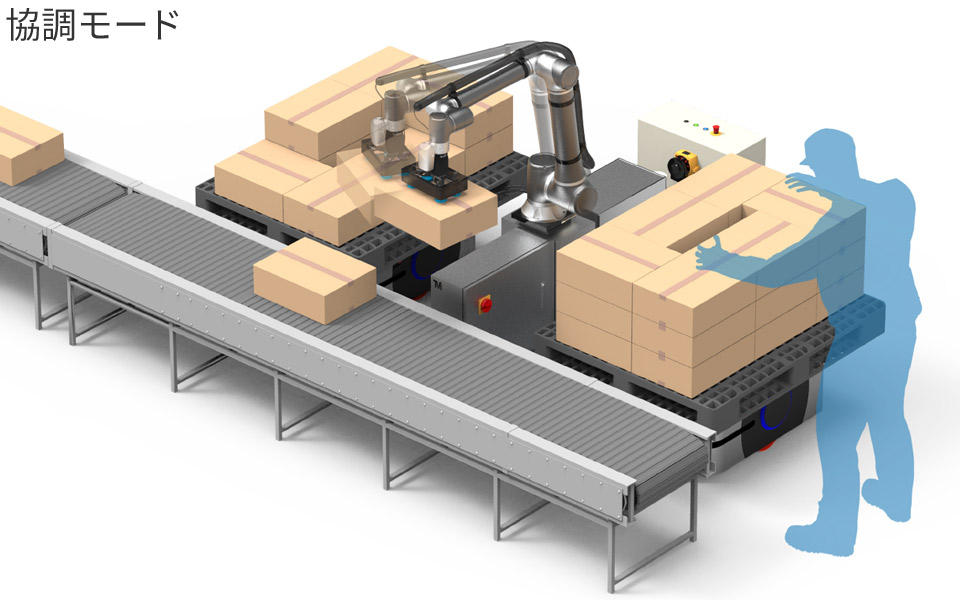
人の介在度合いに合わせた最適動作で荷積み能力を最大化高速モード、協調モード、保護停止モードを活用
協調ロボットTMシリーズは、高速モード、協調モード、保護停止モードがあります。
オムロンの安全機器と組み合わせ、人が存在しないときは高速モードで動作、人を検出(ロボットの近くを人が通過または近くで作業)すると協調モードへ自動的に切り替わり、最適動作で荷積み能力を最大化できます。人がロボットに接触し、設定された以上の力が加わった場合は、保護停止モードとなります。
Point.3
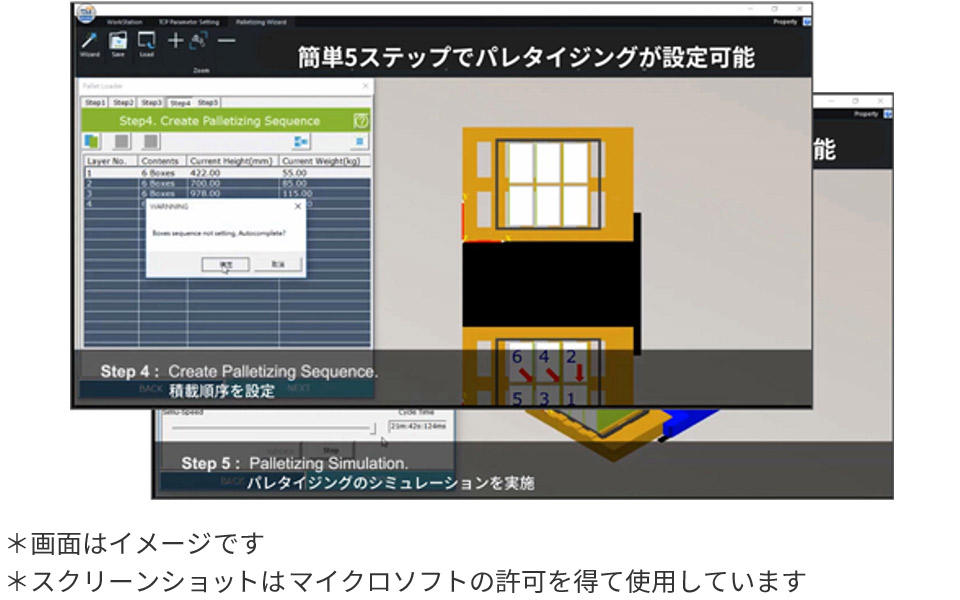
プログラムレスですぐ使える簡単設定短時間での立ち上げと段取り替えが可能
パレタイザー用アプリソフト(2021年上期リリース予定)を使用し、簡単にパレタイジング動作を作成できるため、動作プログラムの作成工数を削減できます。