人と機械の高度な協調を実現
オムロンでは2016年に「i-Automation!」という独自のモノづくり革新コンセプトを発表。同社が展開する20万種以上の製品群をベースに、「integrated(制御進化)」「intelligent(知能化)」「interactive(人と機械の新しい協調)」という3つの方向性で、モノづくりのノウハウを生かしたアプリケーションを中心としたソリューション提案を進めてきた。2022年1月にはこの「i-Automation!」をブラッシュアップし「i-Automation!-Next」として、「人を超える自働化」「人と機械の高度協調」「デジタルエンジニアリング革新」という3つの現場革新を進める方針を示している。
今回のiREX2022でもこれらの3つの現場革新を実現するさまざまな技術やデモを披露した。「人と機械の協調」では、協働ロボットと人が相互に補完しそれぞれが得意な作業に集中できる協働ラインを紹介した。制御機器の組み立てラインを想定し、ロボットには難しい組み立て作業などは人が行い、ロボットでも可能なネジ締めや検査などの工程をロボットが担う。また、部品の配給なども映像でトレイの状況などを監視し自動でモバイルマニピュレーターが行う。ロボット周辺には柵はないがセーフティレーザースキャナーを設置し、一定の距離に人が入れば、ロボットが低速となり、さらに距離が近くなれば止まるようになっている。

これらの作業状況は、工程ごとに、設備や機械から取る情報やワークの送り状況を記録。さらに、ライン上部に設置されたカメラから人の動きも抽出して同一のタイムライン上に記録できるようにしている。これにより「同じ時間軸で人の動きと機械の動きが見られることで、人と機械のバランスを見ることができる。人が工程の場所にいるのに機械が動いていない時間が多ければ、設備の不具合や段取り替えに問題があるかもしれない。そういう分析が行いやすくなる」(担当者)としている。

機械と人が同時に動いていない場合、ラインに何らかの不具合があることが想定できる
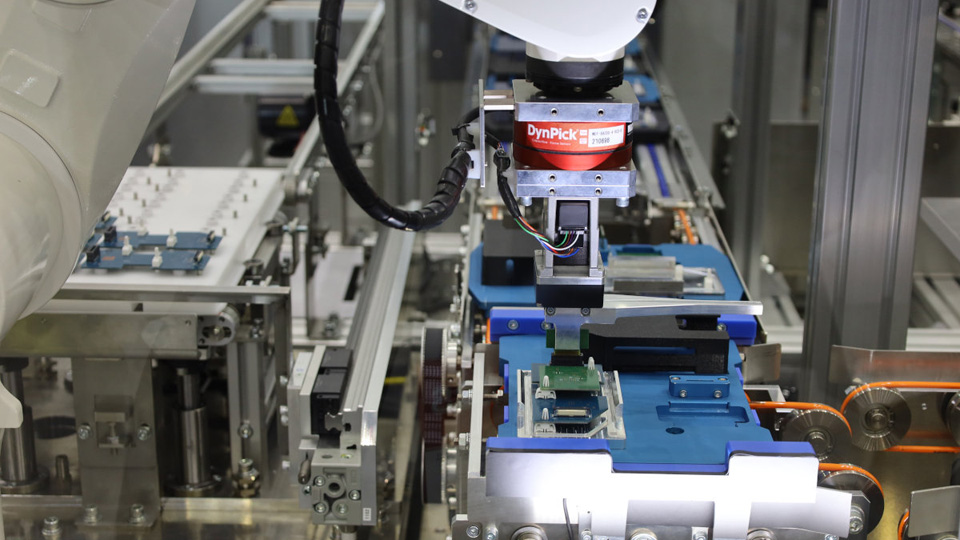
人の動きを実現するすり合わせる動き
「人を超える自働化」では、ロボットが従来難しかった不定形物の組み立てや嵌合などのデモを紹介した。1つは、フレキシブル基板のコネクター部をカメラ映像により形状認識し、正しい向きで嵌合するデモだ。フレキシブル基板は柔らかく形状が変わるために、ロボットが認識してつかみ、さらに正しい方向で嵌合することは難しかった。それを、ロボットでフレキシブル基板の一部をつまみ、基板に沿わせて引き延ばすような動きをすることで正確にコネクター部をつかむことができるようにし、さらにロボットハンドに付けたカメラで向きを把握することで正しく嵌合できるようにしている。

もう1つは、同じロボットを使い、力覚センサーによるフィードバックを活用しながら固い基板の嵌合を行うデモだ。こちらは、コネクターをロボットがつかみ、一度嵌合する動きをする。それにより力覚センサーで接触のフィードバックを受けながら、すり合わせるような動きをして正しい位置にはめるという動きだ。カメラ映像を使うのではなく、人が行う“手触り”などを生かした組み立てだといえる。これらの2種類の嵌合を同一ラインで流す混流ラインをイメージしており、基板のQRコードでこれら2種類の動きを設備側が判断して正しい動作を選択する。
これらを実現できるようになった背景にあるのが、2020年7月に展開を開始した統合ロボットコントローラーである。統合ロボットコントローラーは、従来は別々のコントローラーとソフトウェアが必要だったロボットと制御機器をまとめてコントロールできるというもので、完全に同じシステム上で制御できることにより精緻な設備とロボットの精緻なすり合わせを可能としている。「これらは、従来は人が感触や認識力などを生かして行っていた作業だが、設備とロボットで精緻なすり合わせを行えるようになったことで、自動化ができるようになってきた」(担当者)としている。