
【ロボット統合システムスタートアップガイド】エンドエフェクタの3D情報の設定
ロボットのエンドエフェクタの3D情報の設定手順を説明します。
【公開日】2022/02/21
【時間】1:40
この動画の関連情報


あわせて見たい動画
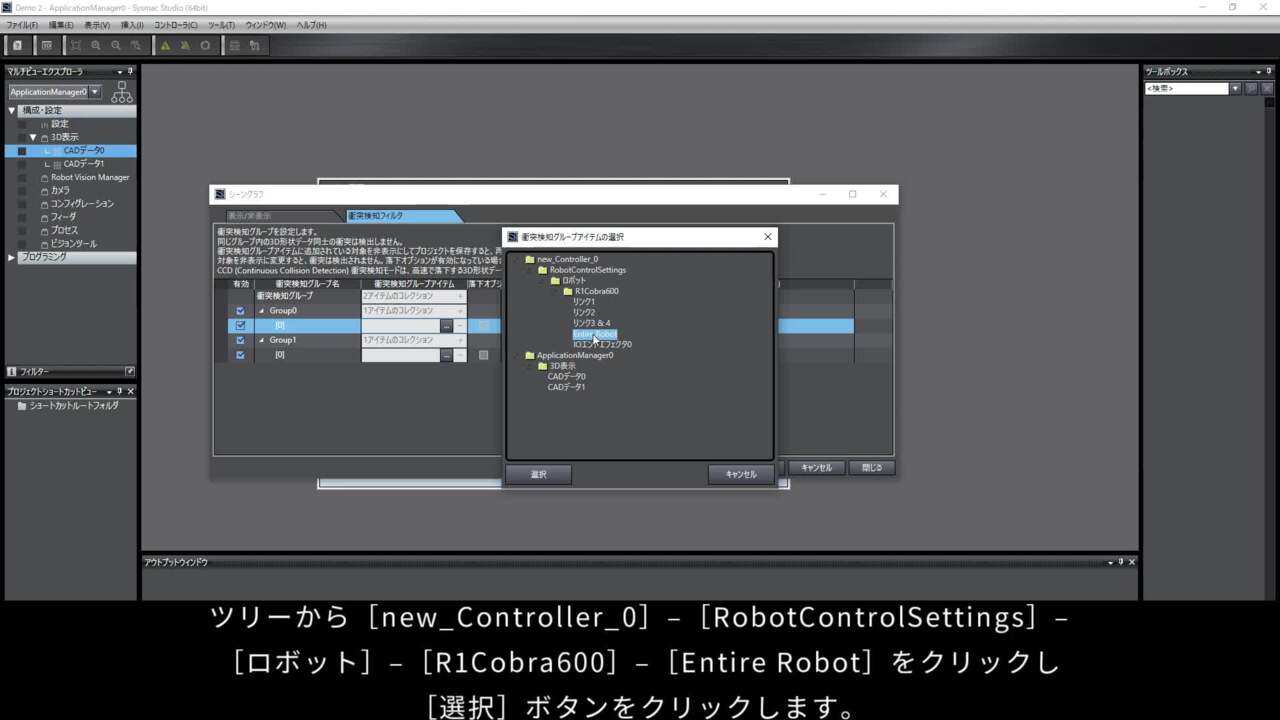
【ロボット統合システムスタートアップガイド】衝突検知機能の設定
ロボットが、他の3D形状データと干渉する場合に、シミュレーションで検出できるようにする手順を示します。
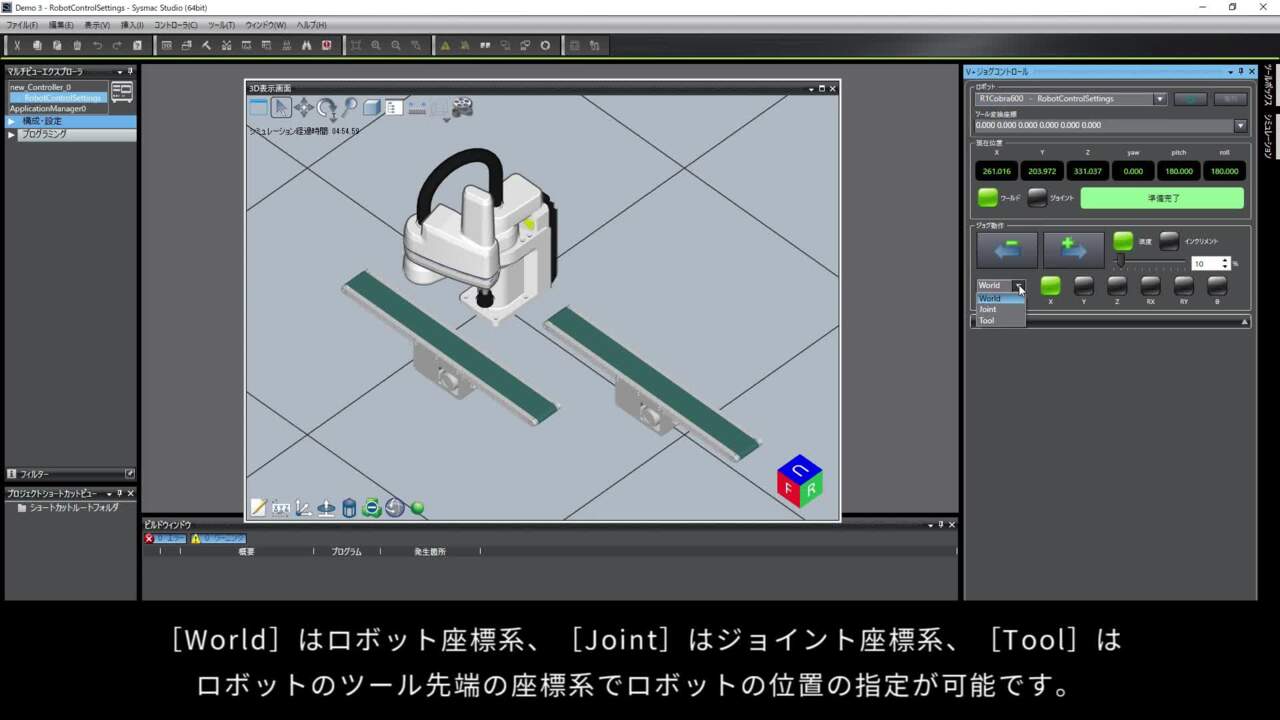
【ロボット統合システムスタートアップガイド】ロボット動作設定 静的ティーチング
静的ピック&プレース装置の、ロボットの待機位置、ピック位置、プレース位置をティーチングする手順を示します。
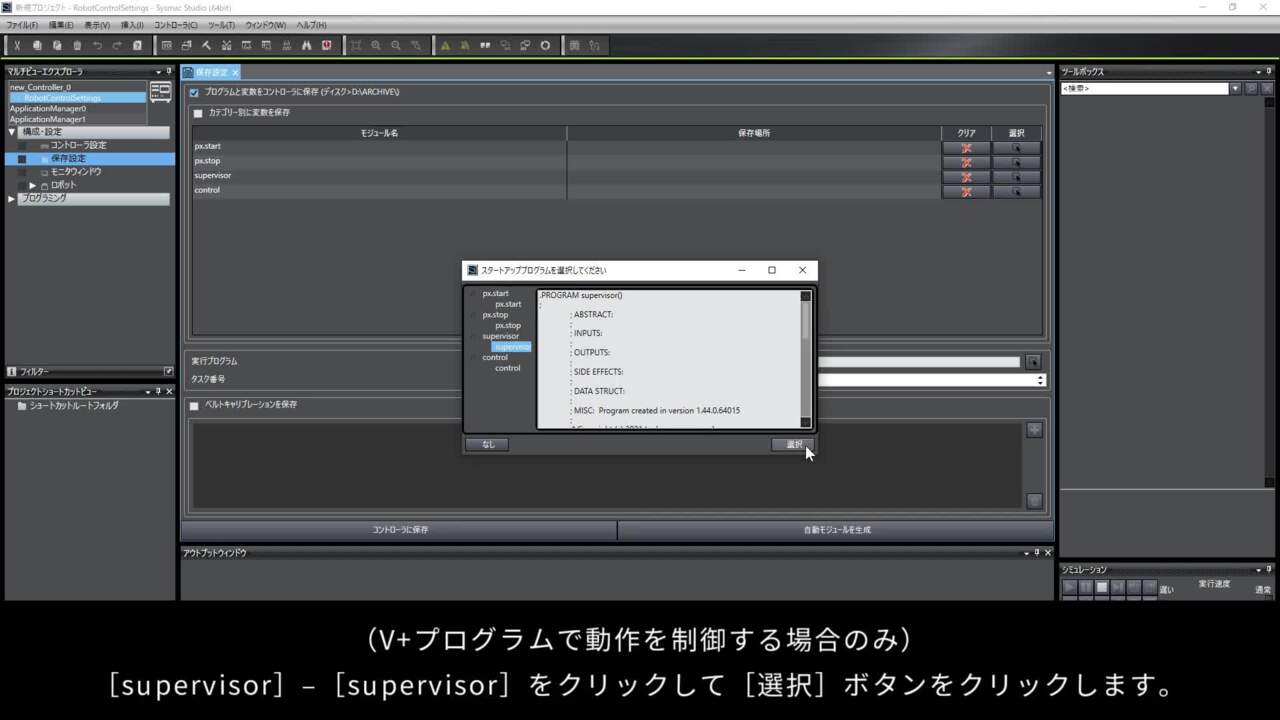
【ロボット統合システムスタートアップガイド】V+プログラムと変数の電源ON時の自動読み込みの設定
電源ON時にV+プログラムとグローバル変数を自動的に読み込むための設定手順を説明します。
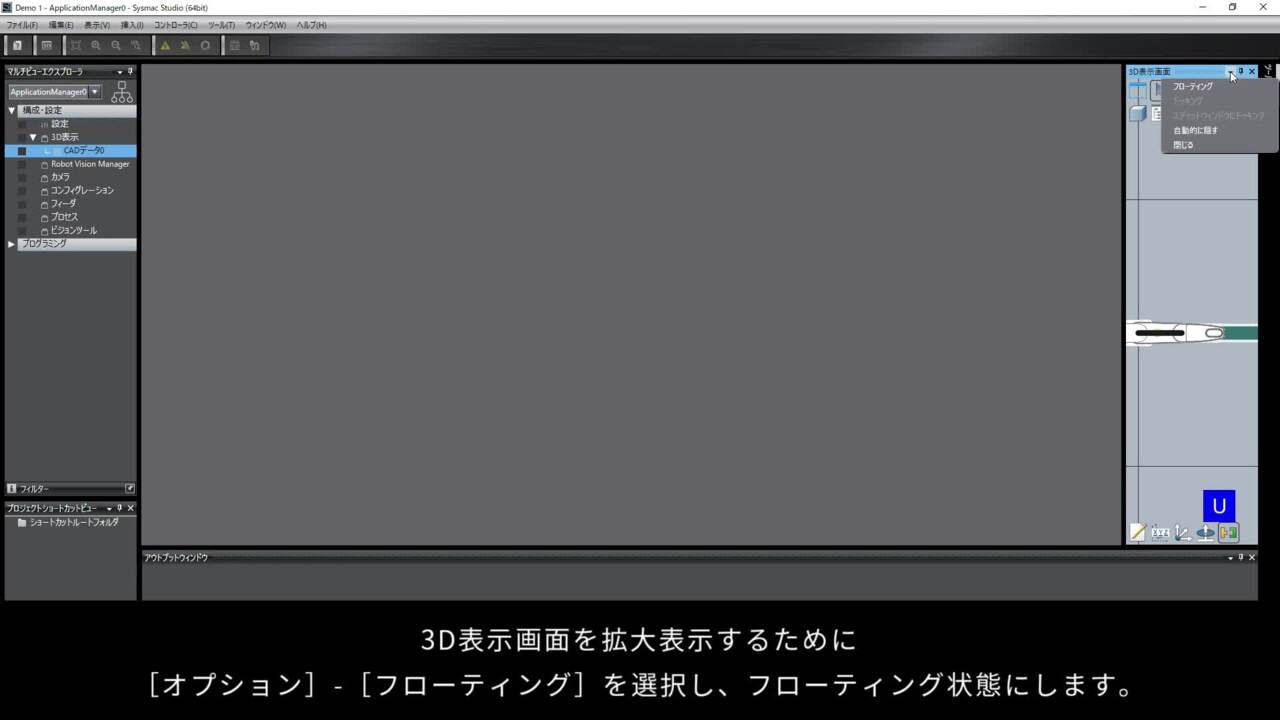
【ロボット統合システムスタートアップガイド】3D CADデータのインポートと3D形状データの配置
Sysmac Studioに3D CADデータをインポートし、3D表示画面上で適切な位置に配置する手順を示します。
【ロボット統合システムスタートアップガイド】V+プログラムの作成
V+プログラムの作成手順を説明します。
【ロボット統合システムスタートアップガイド】シミュレーションでの動作確認
Sysmac Studioのシミュレーション機能を使用してロボットの動作を確認する手順を示します。