インターロック
停止時でも駆動部を
減速しながら
制御停止
(安全機能 SS1:Safe Stop 1の使用例)
従来、インターロック停止時は動力遮断していたため、各モータ駆動部で同期ズレが発生し、製品の廃棄や機構の破損に繋がる恐れがありました。
安全機能に対応した1Sサーボシステムであれば、SS1機能を使用し、各モータ駆動部を減速しながら制御停止できます。その後に動力遮断するので、同期ズレが回避でき、スムーズな再起動が可能です。
2軸直交ロボットでのSS1機能の使用事例紹介
SS1機能を使用する事で、インターロック停止時でも2軸の同期を維持した状態で減速しながら制御停止できます。
本デモ機の安全機能対応1Sサーボシステム、標準コントローラ、安全コントローラ、安全IO入出力、安全ドアスイッチによる構成で安全関連部の妥当性の結果としてPLe/SIL3を達成できます。
オートメーションソフトウェア
Sysmac StudioでSS1機能を設定
SS1機能の設定方法の概略をご覧いただけます。
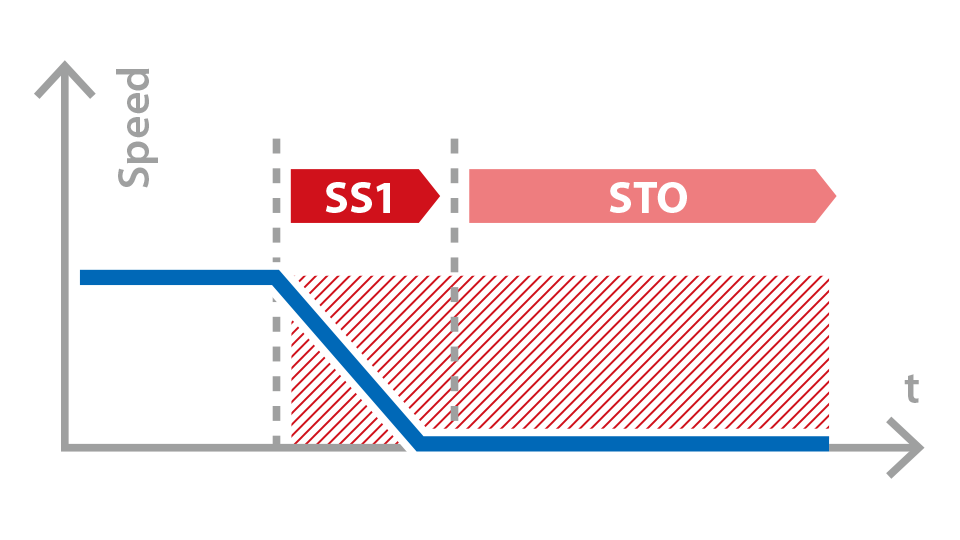
安全機能 Safe Stop 1(SS1)とは
SS1が有効になってから指定した時間が経過すると、STOによりモータを安全に止める機能です。