人と装置の位置関係に応じて
安全な動作範囲で稼働
(安全機能SLP:
Safely-Limited Positionの使用例)
従来、ワークの不具合調整のために作業者が装置の動作範囲に立ち入る場合には、安全確保のため装置を停止させる必要があり、ダウンタイムが発生していました。
安全機能に対応した1Sサーボシステムであれば、SLP機能を使用し、装置の動作範囲を監視できます。作業者に危険が及ばない安全な範囲で動作できるので、装置のダウンタイムを最小化することができます。作業後、作業者が安全な位置に移動すれば、通常動作に復帰します。
2軸直交ロボットでのSLP機能の使用事例紹介
SLP機能を使用する事で、保護扉開放時に可動部の位置が指定範囲内である事を監視します。
本デモ機の安全機能対応1Sサーボシステム、標準コントローラ、安全コントローラ、安全IO入出力、安全ドアスイッチによる構成で安全関連部の妥当性の結果としてPLe/SIL3を達成できます。
オートメーションソフトウェア
Sysmac StudioでSLP機能を設定
SLP機能の設定方法の概略をご覧いただけます。
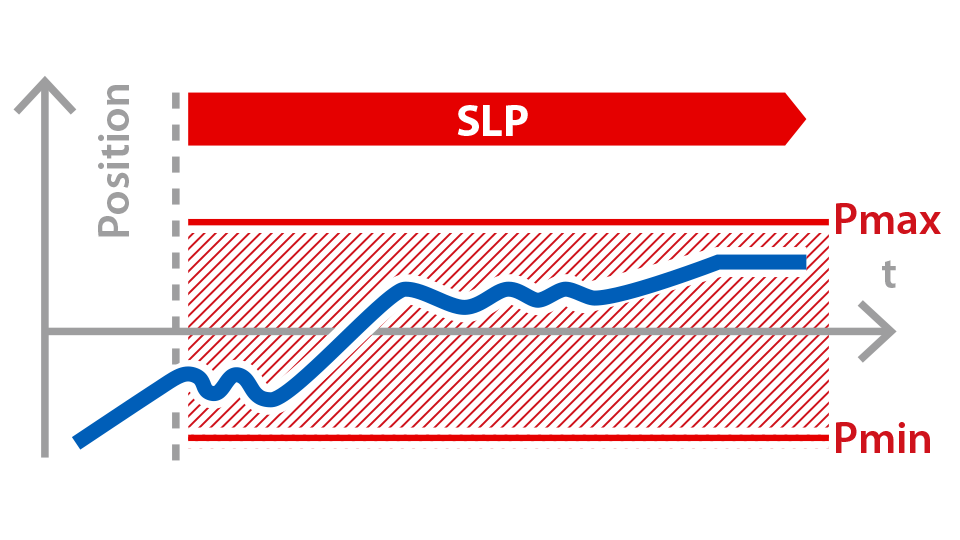
安全機能 Safely-Limited Position(SLP)とは
安全位置を監視する機能です。値が設定した監視範囲を超えた場合、ユーザに通知し、モータを停止させます(STO状態)。