Visit our international website Omron IA global
商品情報トップ
関連情報
ソリューショントップ
現場の異常にすばやく対応できるシステムをテンプレート活用で簡単構築
現場と経営の情報連携プラットフォームを専門的なIT知識不要で構築
ダウンロードセンタトップ
サービスサポートトップ
eラーニング・セミナトップ
オムロンの提供価値トップ
販売ネットワークトップ
お客様の課題解決に効果的な、オムロン制御機器の用途・改善事例をご紹介します。
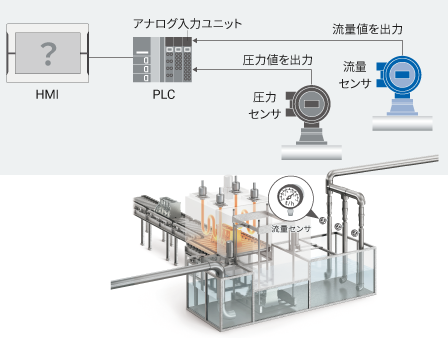
「流量と温度」の同時アナログ出力による見える化
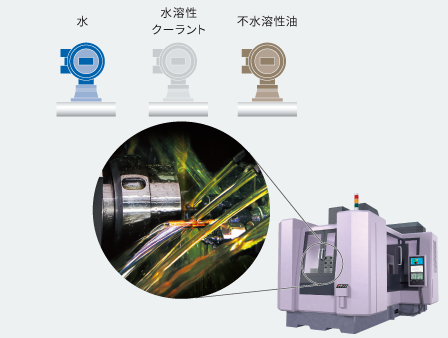
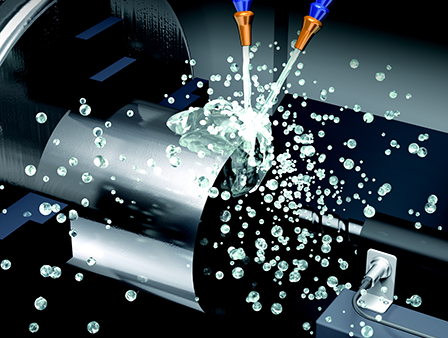
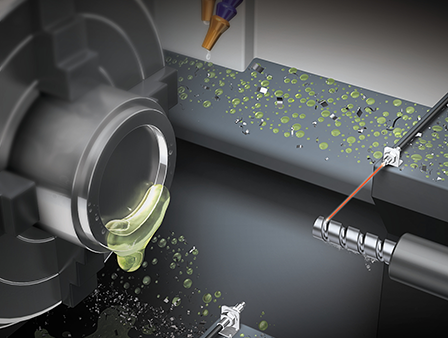
切削油の流量管理
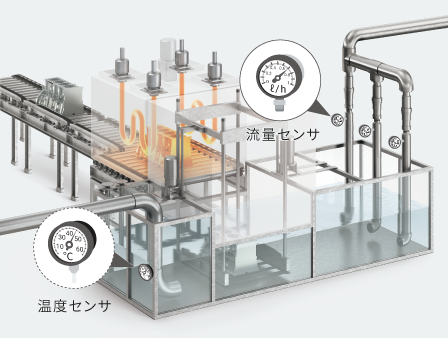
流量+温度監視による冷却安定性向上
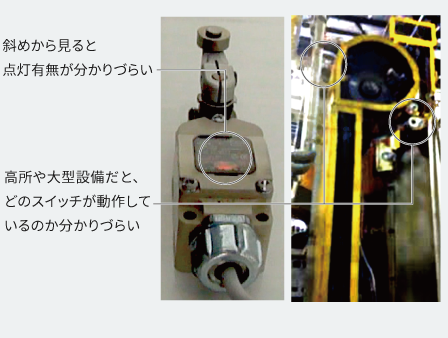
リミットスイッチの表示灯の動作確認を向上
リミットスイッチの回転ローラ外れによる設備の突発的な停止を低減
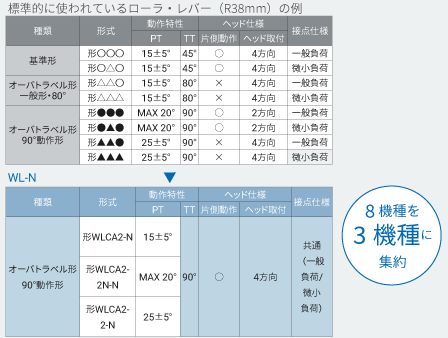
リミットスイッチの機種選定時間短縮
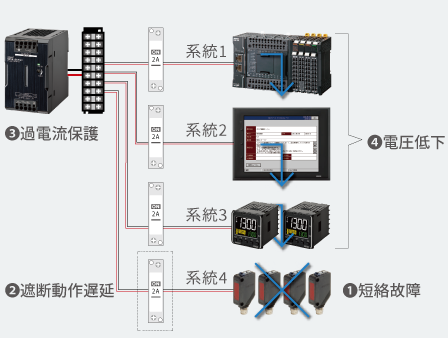
DC電子式サーキットプロテクタで異常回路を瞬時に遮断
サーキットプロテクタのUL認証取得の手間と費用を削減
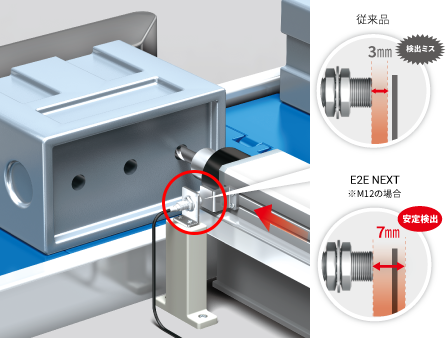
鉄・アルミ混流ラインでの近接センサによる着座検知
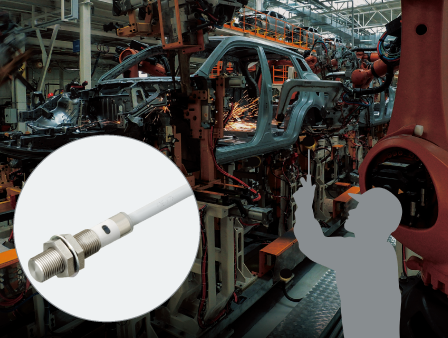
レーザ印字による近接センサの交換ミス低減
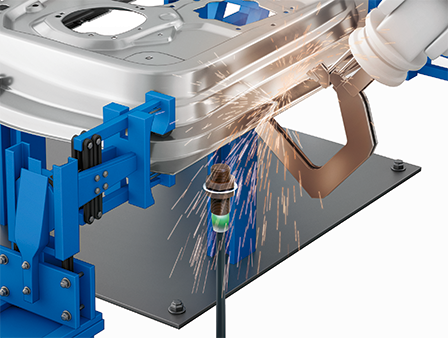
スパッタによる近接センサの誤作動防止
ロック式セーフティドアスイッチのメンテナンス工数削減
ロック式セーフティドアスイッチの設置工数削減
危険源エリアからの緊急脱出
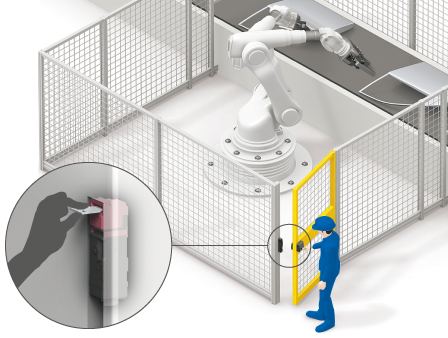
ロック式セーフティドアスイッチの無効化防止
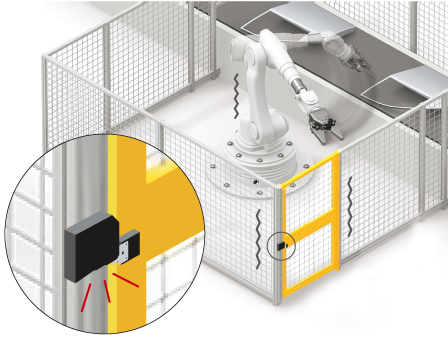
非接触式のセーフティドアスイッチの設置スペース削減
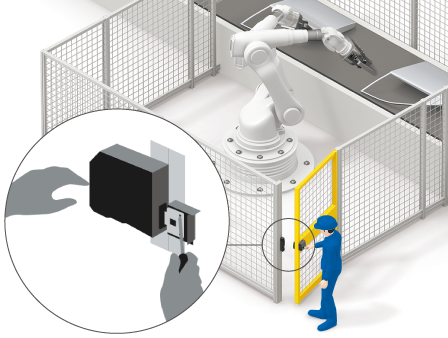
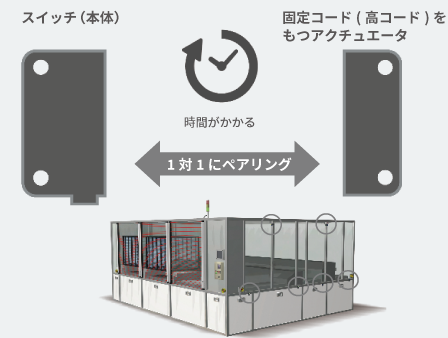
高コード非接触式セーフティドアスイッチのティーチング時間の短縮
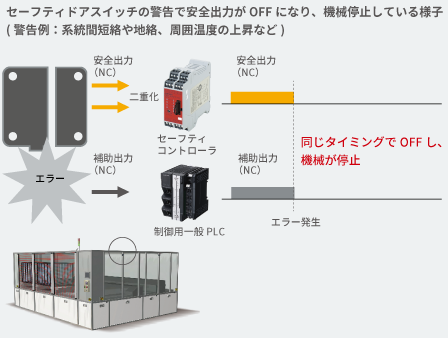
セーフティドアスイッチの制御出力OFFによる不要な機械停止の回避
色の違う組み立て前の段ボールの通過検出
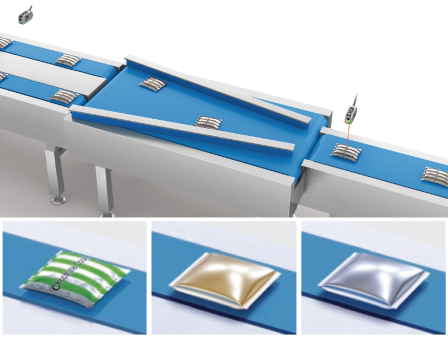
異なる色柄や材質で包装されたお菓子の通過検出
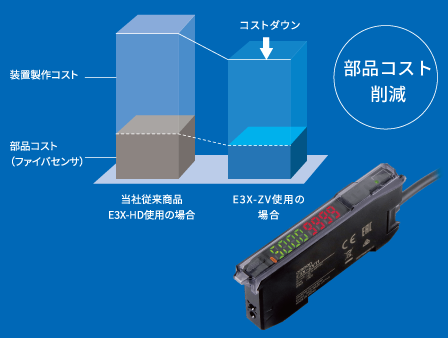
ある・なし検出用途のファイバセンサのコストダウン
量産設備のセーフティライトカーテン設定時の立ち上げ時間の短縮
オプションの自立スタンドでセーフティライトカーテン設置工数の削減
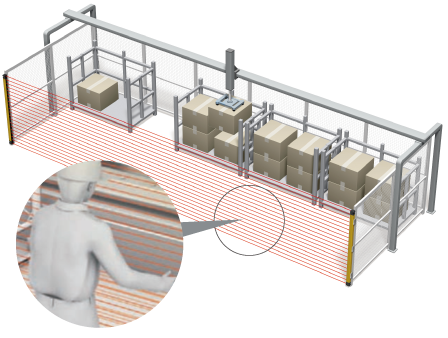
最適な光軸数のセーフティライトカーテンの選定によるコストダウン
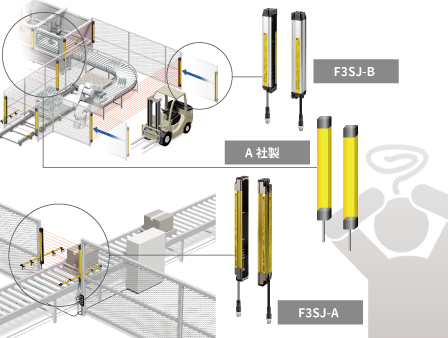
新旧の異なるセーフティライトカーテンのメンテナンス工数削減
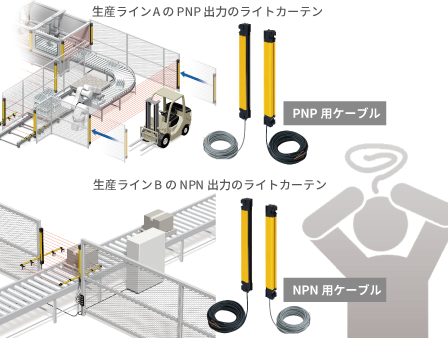
セーフティライトカーテンのPNP/NPN出力が混在する現場でのメンテナンス部材の効率管理
セーフティライトカーテンのレンズ面の清掃頻度低減
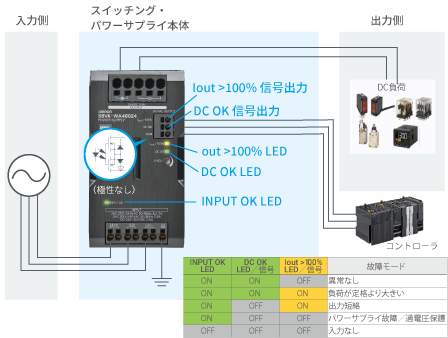
スイッチング・パワーサプライが出力していないときの保全工数低減
海外向け三相設備のスイッチング・パワーサプライ選定
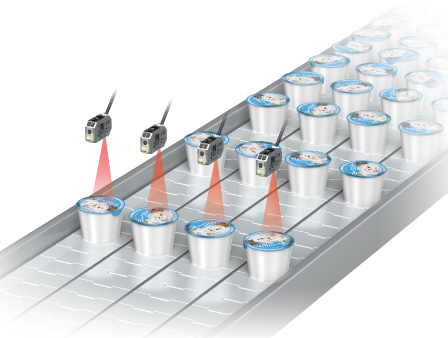
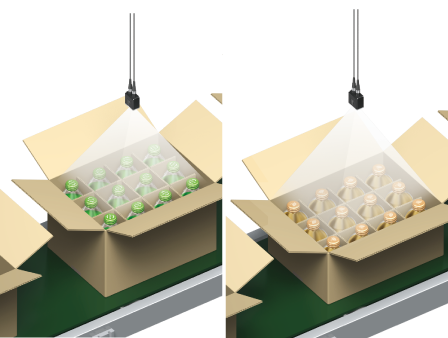
多列搬送ラインに流れる容器のアルミ蓋の有無検知
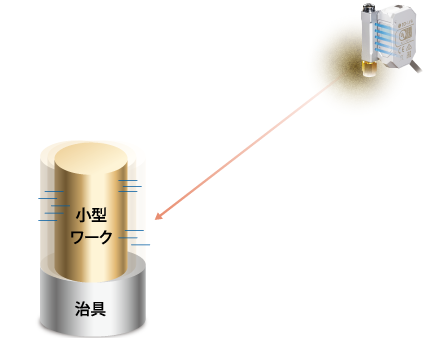
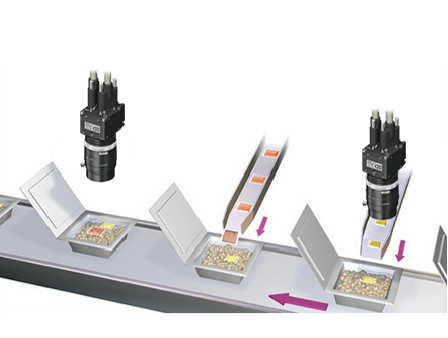
セラミック溶射工程内の小型ワークの有無検出
光電センサの反射板が設置できない搬送ラインでのワーク通過検出
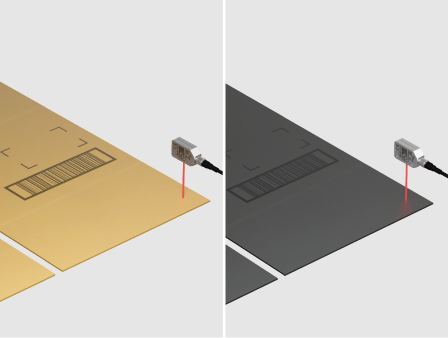
反射形の光電センサで色が異なる段ボールを安定検出
複数の光電センサの穴位置検知による自動車部品の品種判別
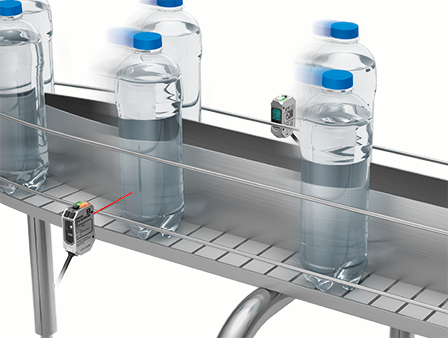
反射形の光電センサで透明体ワークを安定検出
曲面や複雑な凹凸、光沢面のある金属ワークの有無検知
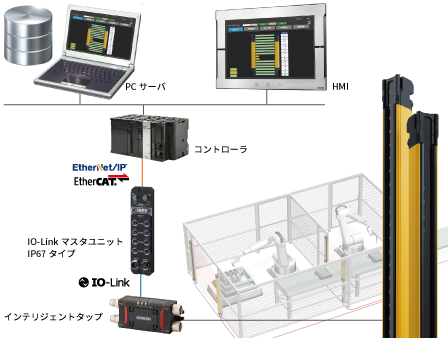
セーフティライトカーテンの状態監視により突発停止低減とダウンタイム短縮
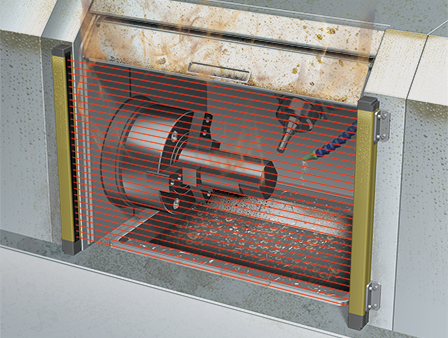
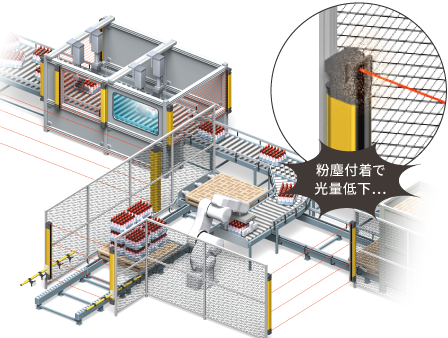
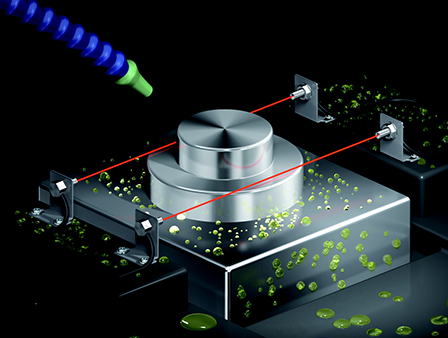
切削油が飛散する場所やオイルミストの環境下でのセーフティライトカーテンの長時間使用
セーフティライトカーテンの光軸調整時間を短縮
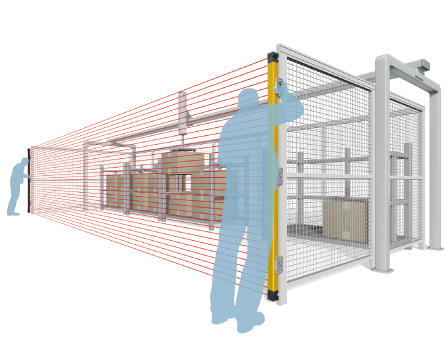
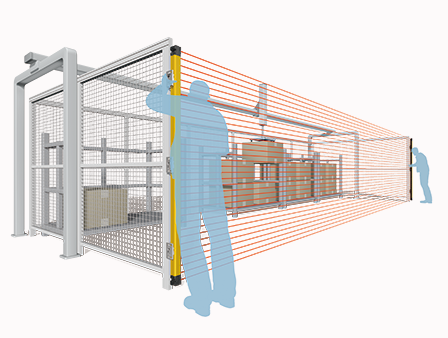
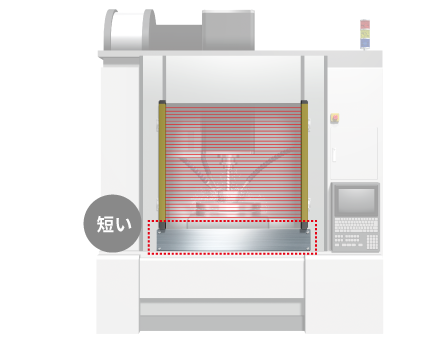
開口部に合わせて最適な長さのセーフティライトカーテンで安全設計
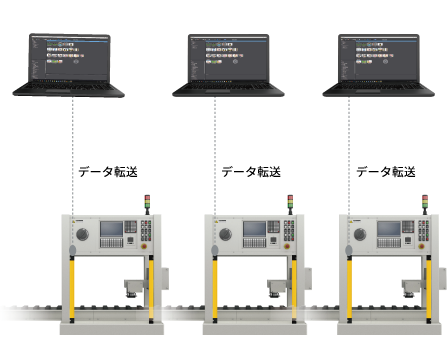
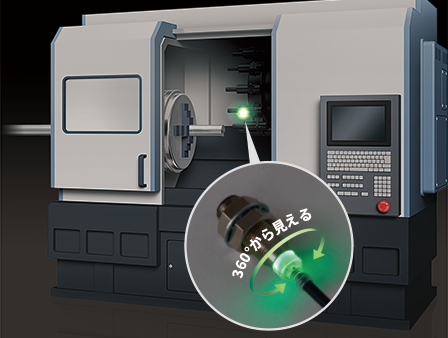
離れた場所からでも容易にセーフティライトカーテンの動作状態確認
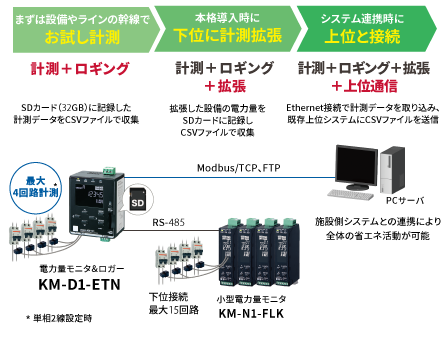
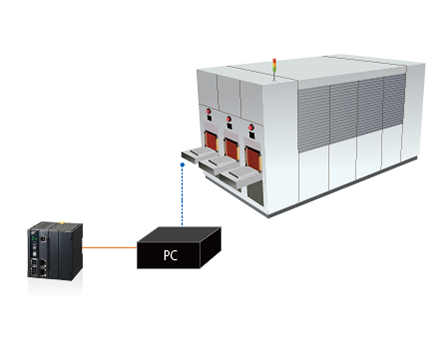
装置や設備の使用電力を モニタリング
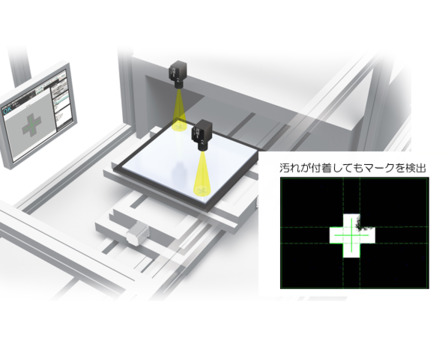
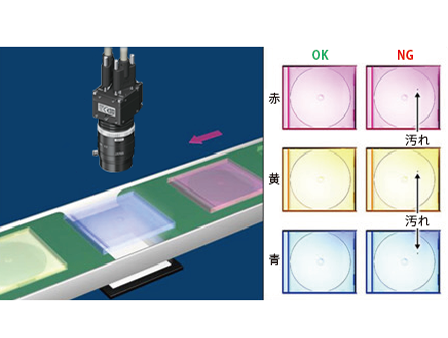
センサ検出面に付着する「汚れ」によるライン突発停止頻度と清掃回数の削減
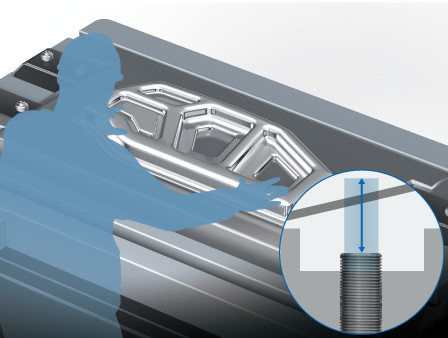
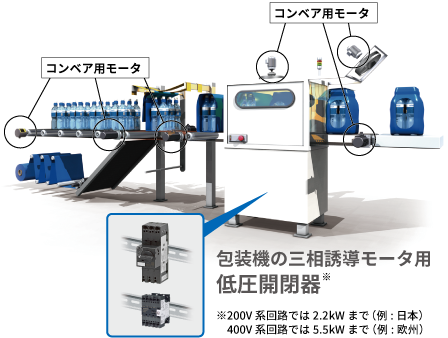
三相誘導モータの低圧開閉器のねじトラブル回避とスペース課題
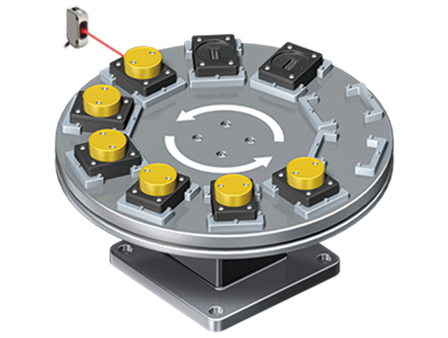
インデックステーブルのワーク有無検出
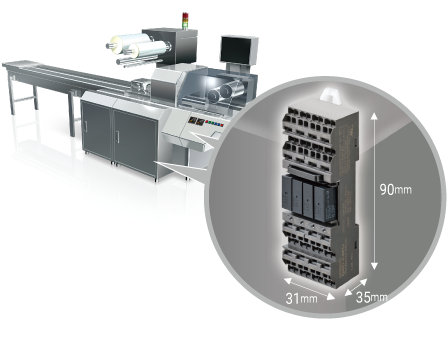
プッシュインPlus端子台タイプのターミナルリレーによる配線工数削減
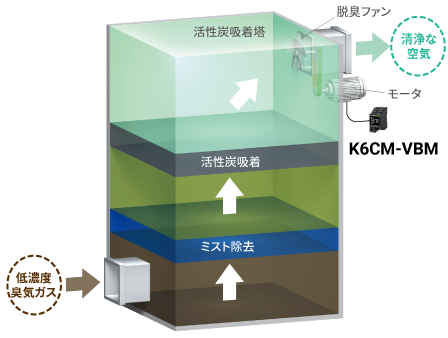
スクラバー(臭気ガス処理設備)の脱臭ファンモータの常時監視
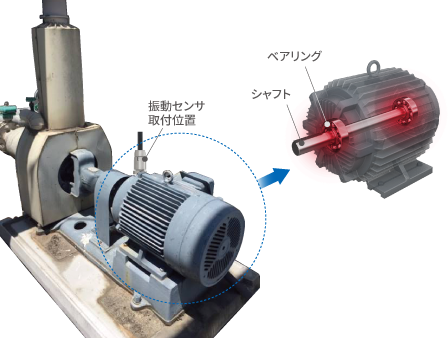
冷却水循環ポンプの軸受(ベアリング)異常を常時監視
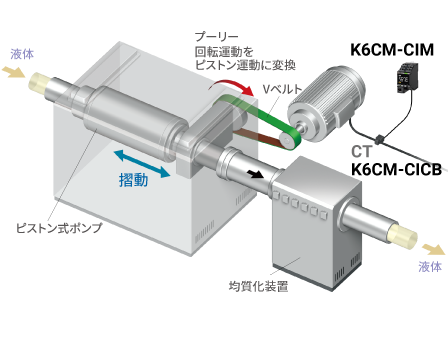
ホモジナイザー摺動部のパッキン劣化を常時監視
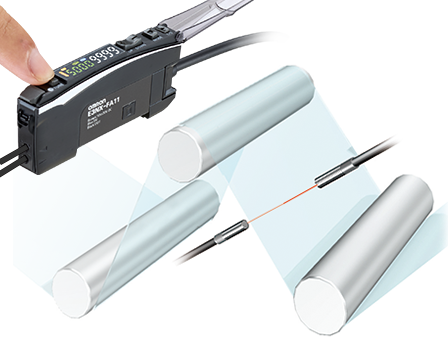
ファイバユニット選定工数削減
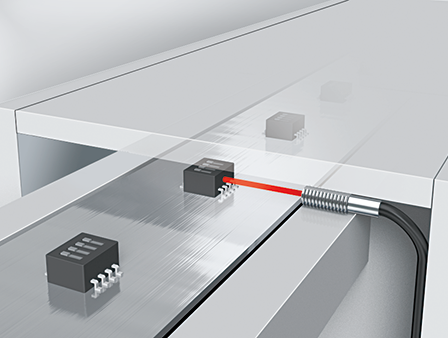
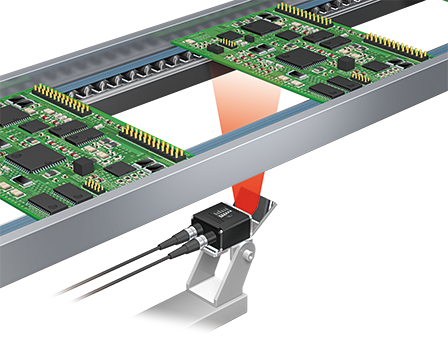
装置内狭小スペースでの電子部品の”誤検出”削減
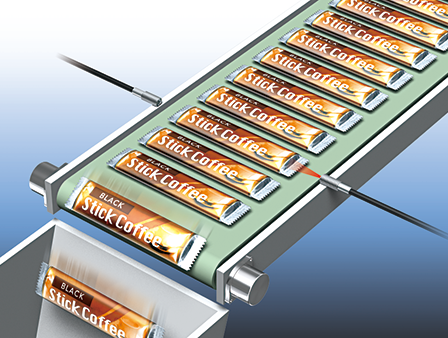
スティックコーヒー(食品・飲料製品)通過検出時の異物混入防止
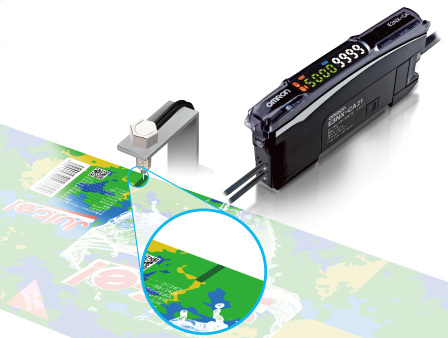
背景(下地)と微妙な色差のカラーマーク(レジマーク)を安定検出
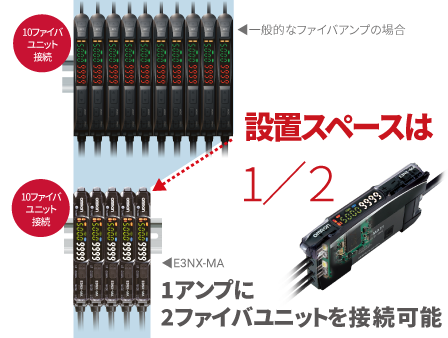
ファイバアンプの設置スペース削減
“飽和”しがちな透明体の有無検出
ファイバアンプの設定時間短縮
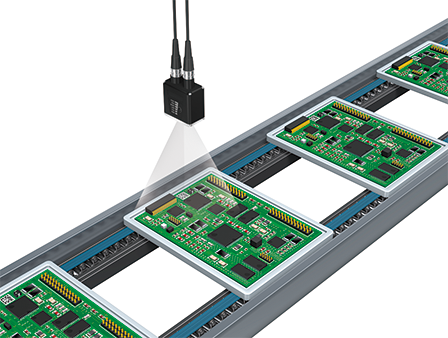
基板のコード読取り
自動車組み立て部品(ドア)のDPM(ダイレクトパーツマーキング)読取り
品種違いの製品入り数検査
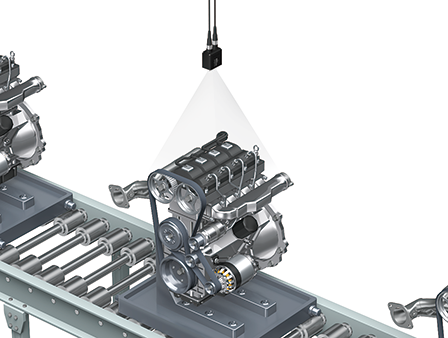
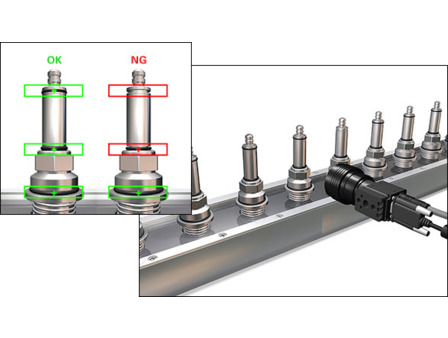
エンジン組み立て工程での複数ボルトの有無検査
電子部品の有無判別検査とコード読取り
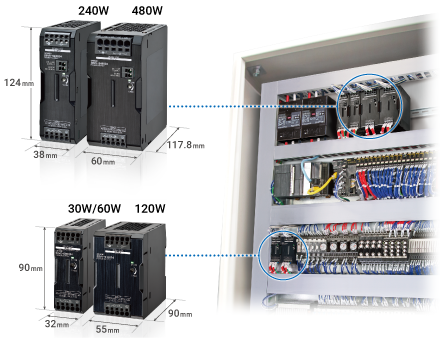
DC電子式サーキットプロテクタで スイッチング電源(DC24V系)周りを省スペース化
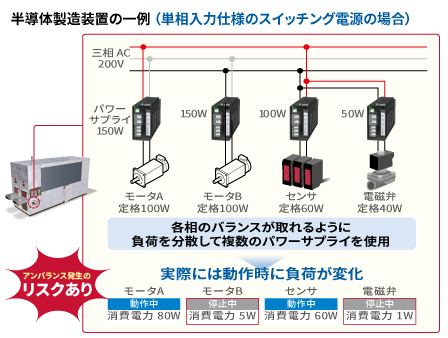
三相装置の三相平衡対応
スイッチング電源の保全工数削減
制御盤内のスイッチング電源の占有スペースを削減
切削加工用シリンダの検知
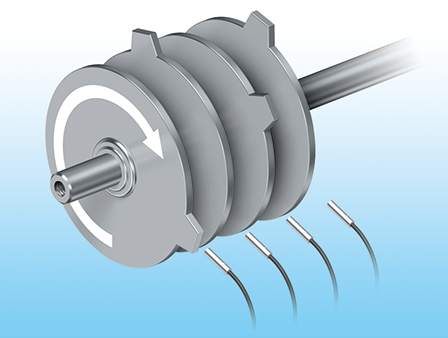
カムスイッチの検知
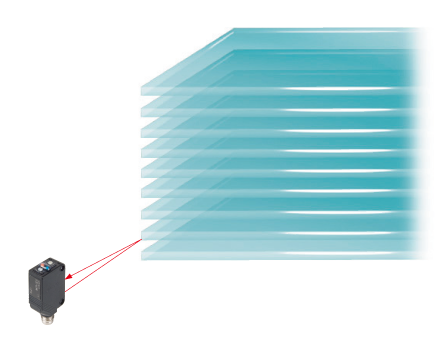
液晶ガラスのマッピング
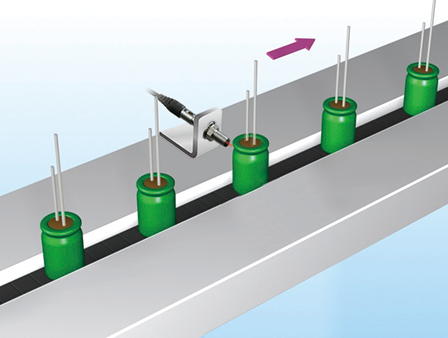
コンデンサの通過検知
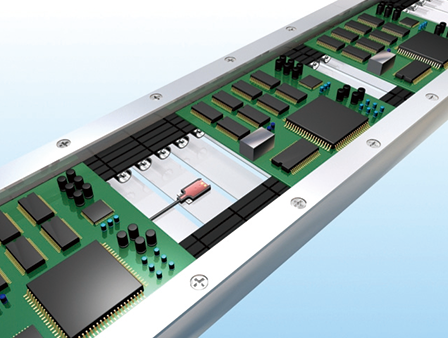
基板搬送時の有無検知
ICの通過検知
複数色の段ボールの通過検知
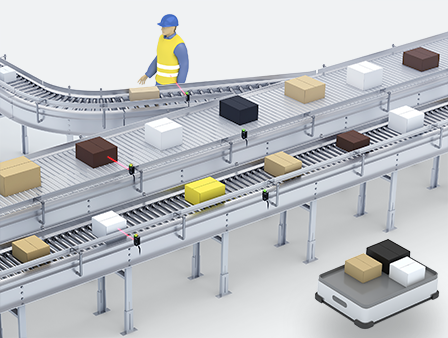
部品トレイの通過検知
切削加工ドリルの刃折れ検出
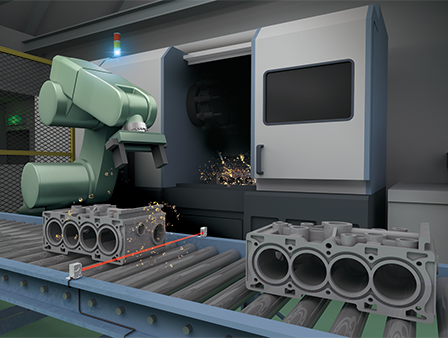
加工後のエンジンブロックの通過検知
切削加工ワークの着座検出
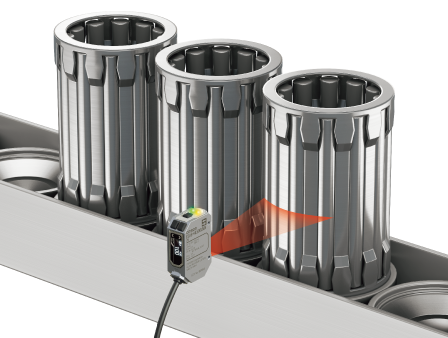
アルミリベットの有無検知
溶接治具の省スペース化
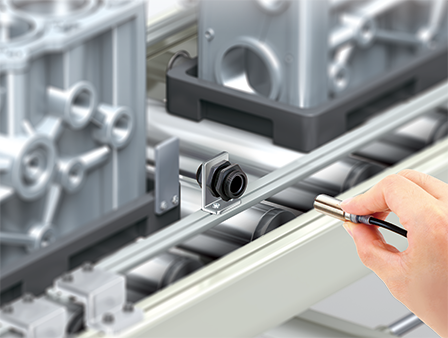
近接センサの交換工数削減
近接センサ設置・交換時の時間短縮
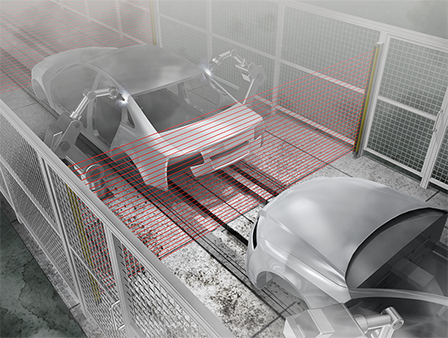
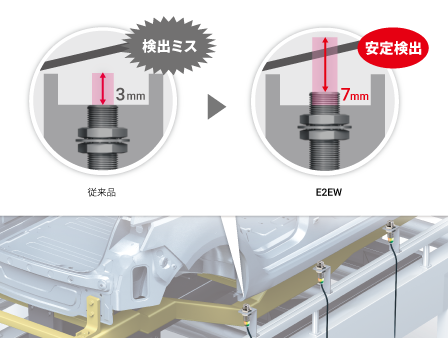
溶接工程での車体の着座検知
スピンドルのドグ検知
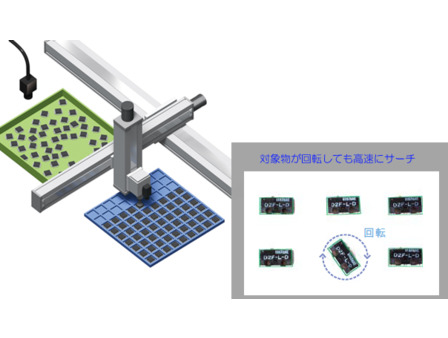
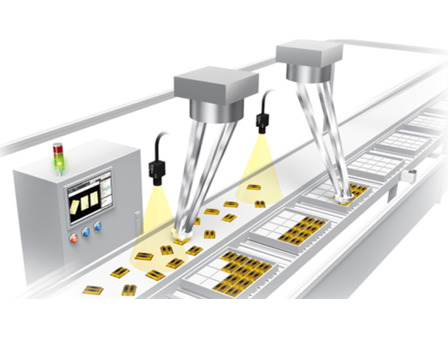
画像処理による部品の外観検査と高速整列
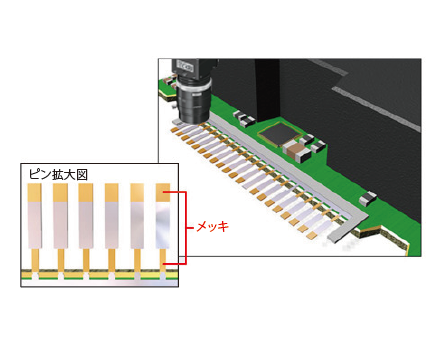
コネクタピンのメッキ加工抜けの検査
液晶ガラス基板のアライメント精度の向上
食品の光沢のある具袋の抜け検査
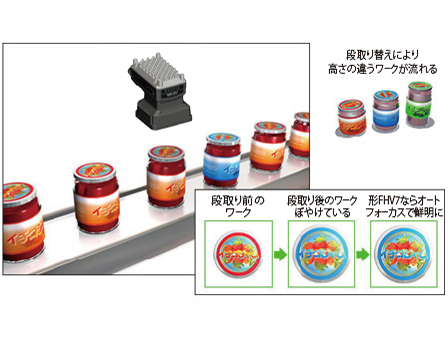
高さやサイズの異なるワークの混入ラインでの 検査・段取り替えの効率化
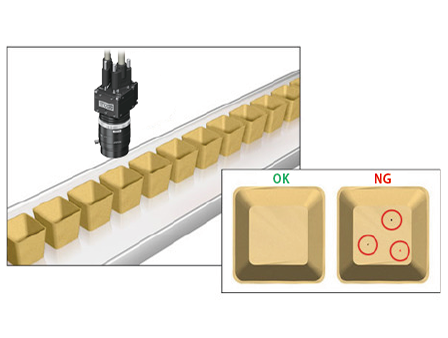
汚れや傷の検査の自動化(高速画像処理で全数検査)
ランプの色違い異種混入検査
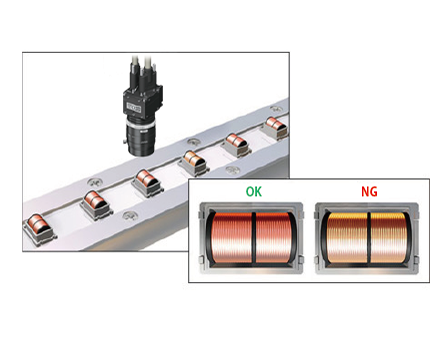
巻線コイルの異種混入検査
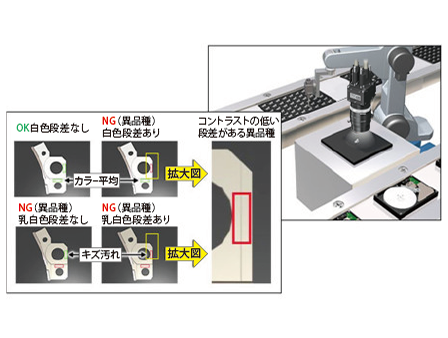
光沢の強い金属部品(カムシャフト)の外観検査
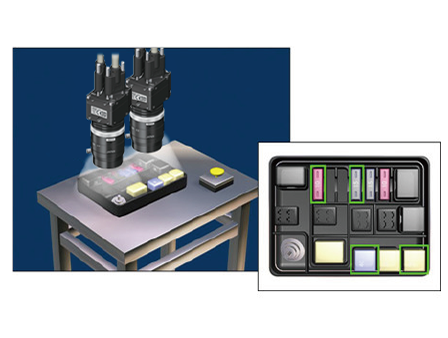
多様な色のヒューズ組み付け検査の効率化
画像検査でHDR(ハイダイナミックレンジ)画像を簡単に生成
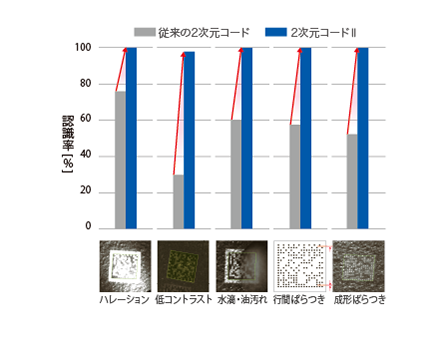
悪環境での「2次元コード」を画像処理をして読取り
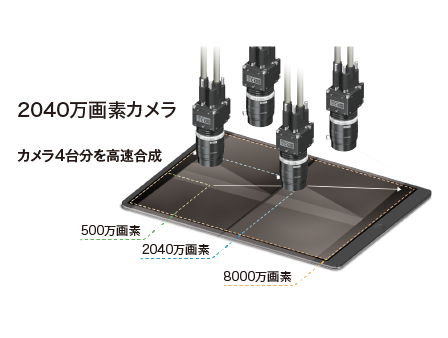
電子デバイスの位置決めや検査の視野の拡大
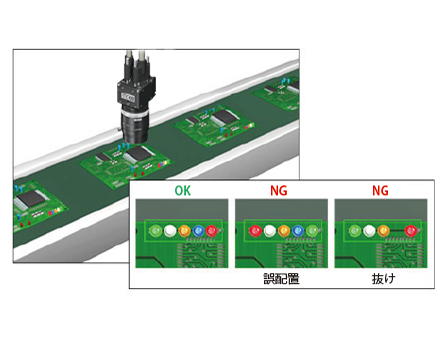
色識別によるLEDの組み付けミス検査
光沢パッケージのピックアンドプレースの外乱光対策
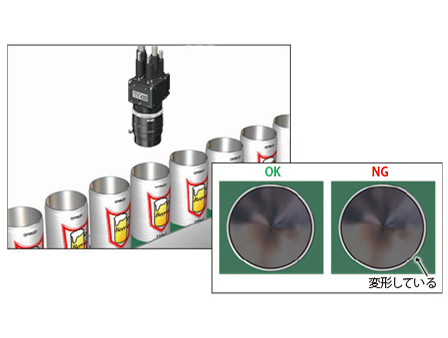
缶などの光沢がある金属部品の変形や打痕等の外観検査
プラスチックケースの傷や汚れの外観検査の自動化
組立部品の付け忘れ(ポカヨケ対策)検査
高速・高精度の位置決めを高機能モーション制御で実現
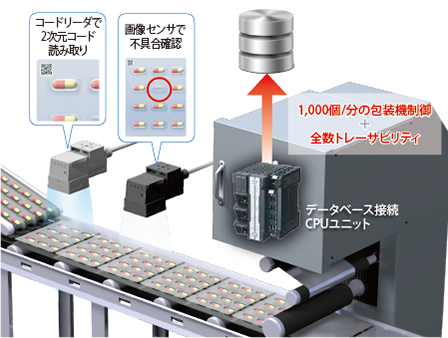
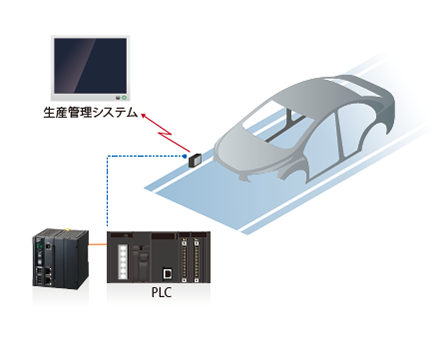
生産タクトに同期する検査情報のトレーサビリティ
高速タクトラインの装置制御と安全制御を統合
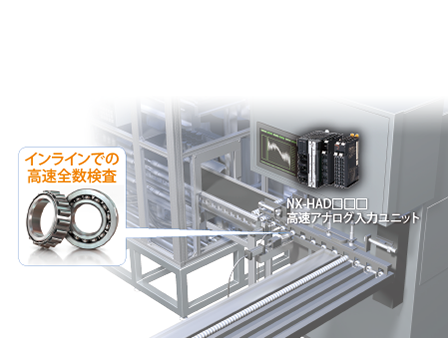
高速でインライン検査を実現
サーボモータの位置/速度/トルク制御の切り替えでカシメ時間の短縮
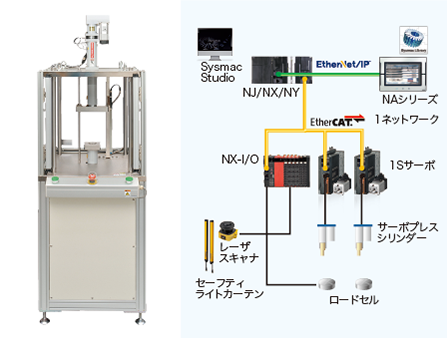
温度制御・モーション制御・計量・安全制御を統合して 設計・通信プログラム工数を削減
装置や設備の立ち上げ時の 個別のセンサの設置や段取り替えの効率化
停電や瞬低でも無線通信断を防止
作業ミスや電源断のときにも産業用PCを正常終了させデータ消失を防止
落雷からの停電でもUPSで制御を継続